Устройство квадрокоптера и из чего состоит квадрокоптер

Рама
Это главная деталь, к которой присоединяются все детали и элементы квадрокоптера. Если вы надумаете сделать квадрокоптер самостоятельно или собрать из готовых деталей то можете приобрести готовую раму от одного из производителей, так и сделать её самому.
Рама должна соединить в себе такие критерии как прочность, и лёгкость. В ней, как правило, есть необходимые отверстия для прокладки проводов. Они характеризуются такими критериями как вес, расстояние между моторами, диаметр труб, максимальный взлетный вес,материал рамы. Большинство рам складные, для удобства транспортировки.
Основные материалы из которых делается рама это карбон, алюминий, стекловолокно.

Контроллер
Одной самой важной деталью устройства квадрокоптера является его контроллер. К нему с помощью шлейфа подключаются барометр ,GPS, акселерометр и все моторы. Контроллер обеспечивает функцию координации, управления, стабилизации квадрокоптера в полёте и управление им.
Чем большей функциональностью напичкана плата тем более разнообразен будет полёт квадрокоптера. Наилучшими считаются Naza от компании DJI.

Моторы
Моторы крепятся к раме квадрокоптера, всего 4 мотора. Функция моторов крутить пропеллеры, и лётные характеристики напрямую зависят от тяги мотора. Они имеют различные габариты, потребляемую мощность, то есть ток. Двигатели квадрокоптера бывают коллекторными и бесколлекторными.
При выборе необходимо выбирать 2 левосторонних и 2 правосторонних мотора.
Моторы коллекторного типа устанавливаются в большинстве своём для простых квадрокоптеров, они являются недорогими и подходят для лёгких аппаратов, так как им не хватает тяги. Мало того они быстро выходят из строя.
Моторы коллекторного типа с редуктором устанавливаются на большие квадрокоптеры и готовы выдерживать аппараты потяжелее. Способны поддерживать хорошую тягу и мощность. Они часто перегреваются и шестерни выходят из строя.
Бесколлекторные моторы. Устанавливаются на дорогие модели. Обеспечивают отличную тягу, долгую производительность, хорошую управляемость и стабильность полёта. Стоимость и размеры двигателей превосходят коллекторные типы моторов.

Аккумулятор
При выборе аккумулятора квадрокоптера нужно учитывать его вес и отдачу. Но, как правило, чем меньше вес тем меньше ёмкость. И наоборот. Поэтому нужно найти компромисс. Сначала нужно определить токоотдачу, а после уже выбирать вес, чтоб не получилось так что квадрокоптер не сможет подняться.
Большим успехом пользуются литий-полимерные (LiPo) аккумуляторы. Отличаются они низким уровнем саморазрядки, возможностью пользования в большом диапазоне температур и стабильным разряжением.

Пропеллер
Это самая расходная деталь квадрокоптера. Он преобразовывает энергию мотора в подъёмную силу. Пропеллеры бывают двух видов, как и моторы, против часовой стрелки и по часовой стрелке. Самое главное учитывать при выборе их размер и угол наклона лопасти. Так же они бывают двухлопастные и трёхлопастные. КПД у первых намного лучше.
Советуем взять несколько разных комплектов пропеллеров, ведь показатели будут разные.

ESC — Electronic Speed Control (Электронный регулятор скорости)
Функцией регулятора служит передача оборотов на мотор. Стоит обратить внимание на алгоритмы быстрого отклика. Точная и быстрая реакция на команды полетного контроллера приводят к улучшению стабильности и управляемости мультикоптера, особенно при ветре.

Стоит учитывать: Рекомендованное напряжение питания, максимальный ток, тип аккумулятора, длина, ширина, вес.
Все детали продаются в магазинах, изготовлены они из различных материалов на любой вкус. Вот в принципе и всё что хотелось рассказать об устройстве квадрокоптера.
Будем рады, если нажмете на любую из кнопок:
mykvadrocopter.ru
Из чего состоит квадрокоптер
Если вы решили собрать квадрокоптер своими руками, то вам необходимо знать из чего сегодня состоят эти мультироторные летающие машины.
И так, в первую очередь необходимо выбрать чертежи квадрокоптера подходящей модели – определиться с размером рамы, количеством моторов и их расположением, а также типом микропроцессорной системы контроллера полета квадрокоптера, которая будет определять набор датчиков, стабилизацию, отвечать за полет, а также обеспечивать дополнительные возможности аппарата. Выполнение всех этих задач зависит именно от правильного выбора платы.
Основательное продумывание деталей при выборе нужных технических характеристик квадрокоптера позволит в дальнейшем использовать его с максимальной эффективностью. Например, если аппарат приобретается для ведения аэрофотосъемки, то необходимо подобрать модель, способную удерживать в полете дополнительный вес аэрофотосъемочного комплекса.
К основным составляющим квадрокоптера относятся следующие детали.
• Рама

Рама является важной составной частью этого летательного аппарата, поскольку обеспечивает надлежащий внешний вид, правильное распределение узлов и нагрузок, а также простоту проведения ремонтных работ.
Раму можно изготовить в домашних условиях при помощи подручных средств, или же приобрести в готовом виде и только собрать. На сегодняшний день в свободной продаже имеются самые разные виды рам. В целом она выглядит как перпендикулярно пересекающиеся рейки с пластиковой крестовиной посредине для крепления платы. На сегодня самый распространенный вариант рамы предполагает использование алюминиевых профилей и крестовины из текстолита. Если есть желание потратить по больше денег, то используются карбоновые трубы вместо алюминия. У некоторых видов квадрокоптеров рамы имеют усиленную портативность – они могут складываться и удобно переноситься.
• Плата-контроллер

Как уже говорилось раньше, эта вещь является предопределяющим условием работы аппарата, отвечает за его функциональность и в целом летные возможности. Невзирая на свою компактность (около 5 см х 5 см), у нее есть все необходимое для работы самодельного квадрокоптера.
При креплении платы-контроллера следует помнить, что она должна размещаться на одной линии с линией вращения винтов. Кроме того очень важно уберечь плату от вибрации при соприкосновении с рамой. Чем выше виброизоляция, тем стабильнее летает квадрокоптер, особенно в автоматических режимах. Не стоит забывать также и о защитной крышке, которая убережет плату от повреждений и пыли. Последней очень много при взлете и посадке.
• Моторы

Жестких требований при выборе моторов не существует – можно выбрать любой вариант с вращением 800-1200 об/вольт для 3S аккумулятора. Мощность электродвигателя зависит от предполагаемых размеров и назначения квадрокоптера.
Если вы собираете квадрокоптер для Drone Racing, то на него ставятся небольшие моторы с оборотами в 2200-2300, смотрите статью 10 моторов для Drone Racing для более подробного ознакомления с этими электродвигателями.
• Электронный регулятор оборотов двигателя

При выборе этой детали следует неукоснительно соблюдать некоторые правила:
— Выбирать самое маленькое время отклика (от него зависит точность управления при полете).
— Провести калибровку регуляторов до первого полета. Избегать наличия функции защиты от помех в условиях быстрых осцилляций газа от платы-контроллера (использование такого регулятора может привлечь к отключению аппарата в полете).
— Обратить внимание на возможность перепрошивки регулятора специальной коптеровской прошивкой или взять Afro регулятор (они уже прошитые).
• Пропеллеры

Для создания простейшего квадрокоптера понадобится два пропеллера, вращающихся влево, и два пропеллера вращающихся вправо. Таким образом, легко можно представить принцип их работы и возможность держать в воздухе устройство.
Пропеллеры должны быть узкими, с малым шагом винта. На практике устанавливают попарно пропеллеры разных цветов – таким образом можно будет идентифицировать переднюю и заднюю часть аппарата.
• Соединения
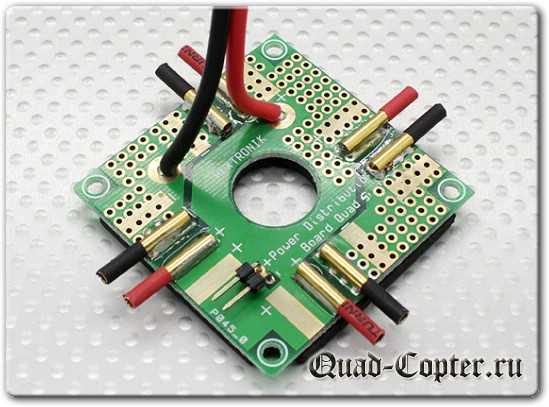
Ввиду наличия нескольких деталей, собранных на одной раме (пропеллеры и плата), становится проблемой правильно разложить и закрепить провода. Хорошим выходом из положения станет специальная плата из текстолита, которая имеет разведенные дрожки питания. Именно к ним можно припаять провода и подвести освещение.
О том, как соединить все это вместе смотрите статью — Соединение электроники квадрокоптера.
• Маркировка и навигация

Готовый квадрокоптер имеет правильную форму и четкую симметрию, потому нужно его каким-то образом маркировать, обозначив переднюю часть. Как писалось ранее, многие используют разноцветные пропеллеры или разноцветные светодиодные ленты.
Удобным способом маркировки может быть установка специального шара, а также правильное освещение — подсветку квадрокоптера, которая будет отчетливо видна в вечернее и ночное время. При свете дня переднюю часть можно легко различить и при помощи специальной раскраски.
• Разнообразные показатели

Для работы квадрокоптера понадобится довольно много датчиков, например, обязательно наличие трех гироскопов и акселерометров – это тот минимум, который обеспечит полет и отлаженное управление. Вместе с тем, на специализированных форумах можно найти множество советов о дополнительных возможностях и необходимых для этого датчиках. Также выбор будет зависеть и от задач, которые возложены на квадрокоптер.
Так, к примеру, для автоматического возврата при потере связи контроллер квадрокоптера должен иметь GPS антенну и преобразователь сигналов. Для четкого контроля высоты полета — бародатчик.
Стоит также отметить такую полезную деталь, как показатель заряда аккумулятора и датчики, позволяющие определить местонахождение аппарата в случае его потери. В качестве последнего может выступать установленный в квадрокоптер GPS треккер. В случае потери квадрокоптера с помощью него можно точку, где он приземлился при окончании батареи.
• Установка камеры

Принцип крепления камеры должен быть тщательно продуман. На малых моделях квадрокоптеров преимущество отдается обычной жесткой фиксации. Вместе с тем, в более сложных моделях камера крепится на подвесе, который гиростабилизирует съемочную камеру, а так же может управляться с пульта. Стабилизация видео делает съемку более качественной и резкие дерганья квадрокоптера не сказываются на записи видео.
В качестве камер для квадрокоптера отлично зарекомендовали себя экшенкамера SJ4000 и экшенкамера SJ4000.
Похожие статьи:
Квадрокоптер своими руками → Как соединить электронику квадрокоптера
Видеоподборки про RC моделизм → Делаем коннексолёт с регулятором 4-в-1
Аксессуары квадрокоптеров → Регуляторы для самодельного квадрокоптера
Квадрокоптер своими руками → Сборка миниквадрокоптера под FPV
Видеоподборки про RC моделизм → Сборка бешеного квадрокоптера!! 3дюйма 5S Lipo! (I)
Видеоподборки про RC моделизм → Хватит жечь дорогую электронику!!!
Аксессуары квадрокоптеров → Недорогой DC-DC конвертер
Видеоподборки про RC моделизм → Сборка гоночного Дрона на формованной раме и регуляторе 4в1
quad-copter.ru
Из каких основных частей состоит квадрокоптер?

При самостоятельной постройке квадрокоптера крайне важно знать его устройство, а также предназначение всех его узлов, умение рассчитать их параметры и настроить их эффективное взаимодействие.
Итак, первое, из чего состоит любое электромеханическое устройство, это рама.
Рама для квадрокоптера – это несущая конструкция, которая соединяет воедино все механические и электронные элементы. Значение прочной и одновременно легкой, правильно центрированной рамы для квадрокоптера переоценить невозможно. Состоит стандартная рама из крестовины – площадки для крепления электронных блоков, и симметрично расходящихся четырех лучей – реек, к внешним концам которых крепятся моторы с винтами. Готовые, или по частям, рамы можно купить, а можно сделать самому. Материалы изготовления: крестовина – пластик, фанера, текстолит; лучи – алюминиевые профили, пластик, карбоновые трубки (дорогое удовольствие). Крепление лучей к крестовине обычно жесткое, но встречается подвижное для складывания и удобства транспортировки.
Двигатели. Нужно 4 совершенно одинаковых электромотора, со скоростью вращения вала в пределах 800-1200 об/мин (для гоночных коптеров – 2200-2300 оборотов). Подбор моторов – дело вкуса, зависит от габаритов (веса) и назначения будущей машины. Коллекторные двигатели белее дешевые, но устаревшие и уступают в надежности бесколлекторным – современным, мощным, высокооборотистым, надежным, но пока еще очень дорогим.
Регулятор оборотов двигателя. Обязательный элемент, на каждый из 4-х моторов отдельно. Регуляторы для коллекторных движков проще и дешевле, для бесколлекторных – соответственно сложнее и дороже. При выборе регуляторов обращайте внимание:
— на время отклика – самое маленькое значение, для точности управления;
— на прошивку – должна быть коптеровская, или же иметь возможность перепрошивки;
— на отсутствие функции защиты от помех при быстрых осцилляциях газа – наличие такой функции может отключить двигатели во время полета, что приведет к моментальному падению коптера (коптеры не могут планировать как самолеты).
Плата-контроллер – сердце и мозг квадрокоптера, отвечает за его летные возможности и функциональность. Главные условия крепления к раме – это максимальная виброизоляция и расположение на линии вращения винтов. Вибрация сильно влияет на стабильность полета.
Плата соединений. Помогает произвести правильную и надежную коммутацию всех электрических и электронных узлов.
Пропеллеры для квадрокоптера. Совершенно необходимая деталь, винты создают аэродинамическую подъемную силу, в буквальном смысле – благодаря пропеллерам коптер может летать. Это те же крылья, только подъемную силу создает не набегающий поток воздуха, они сами движутся, создавая подъемную силу. Вращаются попарно в разные стороны. Подбирают винты с узкими лопастями и с малым шагом. Удобно покупать попарно разных цветов для визуального обозначения передней и задней частей аппарата.
Другое оборудование. Из необходимого – 3 гироскопа и 3 акселерометра для стабилизации полета и эффективного управления. Из необязательного, но важного и полезного оборудования:
— бародатчик – для точного контроля высоты;
— GPS модуль – для автовозврата коптера в случае потери управляющего сигнала;
— GPS трекер – для поиска местонахождения улетевшего коптера;
— видеокамера с обслуживающим оборудованием;
— светодиодная подсветка и т.д.
Главное, помните: вся схема аппарата, все его устройство и начинка рассчитываются на самой начальной стадии постройки, лишь затем следует выбор и покупка составных частей будущего квадрокоптера.
Загрузка…yuschenko.com.ua
Устройство квадрокоптера
Квадрокоптер – это летательный аппарат небольших размеров, имеющий 4 пропеллера, приводящих его в движение. Собрать простой летательный аппарат с четырьмя винтами из запчастей, сможет даже школьник, но для того, чтобы ему это сделать в первую очередь необходимо узнать каково устройство квадрокоптера и что он из себя представляет.
Устройство квадрокоптера
Современные модели – это беспилотные летательные аппараты, в большей степени выполняющие роль интересной игрушки. Но, несмотря на это, большой сегмент рынка занимают профессиональные модели, которые оснащаются цифровой камерой. Они служат заменой операторского крана и других сложных приспособлений, которые не так легко использовать внутри помещений со скованным пространством или на открытых территориях, где применение съемок с других летательных аппаратов невозможно.
Принцип работы квадрокоптера
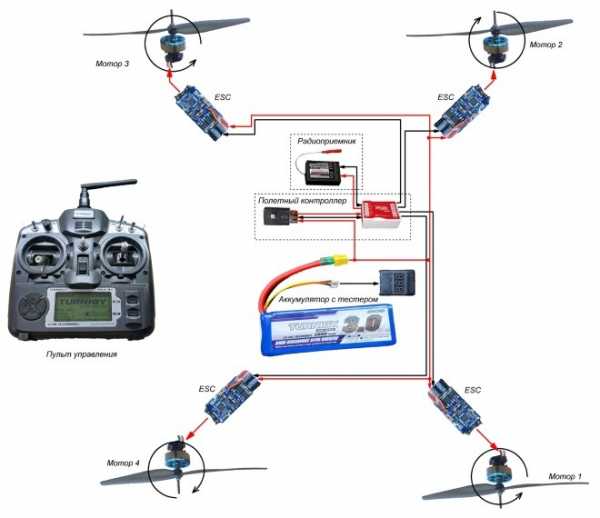
Принцип работы квадрокоптераЭлементы для дрона можно приобрести по отдельности или даже сделать собственными руками. Однако для того чтобы конструкция поднялась в воздух нужно понимать принципы, по которым построено устройство квадрокоптера. Винты, поднимающие его в воздух, управляются парными синхронными двигателями, которые могут быть коллекторными и бесколлекторными. Расположенные по крайним противоположным точкам диагоналей пропеллеры двигаются в одном направлении (по часовой стрелке или наоборот). Два другие аналогичные элемента двигаются в противоположную сторону. За их работу отвечает блок управления (плата) и аккумулятор, питающий их. Посредством приемника управляющая плата получает сигналы от дистанционного пульта. Пультом, в свою очередь, управляет пользователь, находящийся на удалении от аппарата. Сигнал, подаваемый от аппаратуры, дает команду управляющему блоку, и он усиливает или ослабляет работу двигателей.
В зависимости от того, сколько двигателей приостанавливают или усиливают свою деятельность, меняется характер и траектория движения дрона. Он может:
- Подниматься вверх;
- Спускаться;
- Двигаться по горизонтали:
- Вперед;
- Назад;
- Влево;
- Вправо.
Аналогично тому, как происходит движение, также производится и наклон аппарата. Кроме того, некоторые модели могут кружиться на месте и даже выполнять т.н. флипы – перевороты вокруг оси на месте.
Рама квадрокоптера
Рама квадрокоптераЭта составная часть выполняет роль основы, на которую крепятся все остальные элементы от аккумулятора до двигателей и светодиодов. Иногда рама может быть совмещена с наружной обшивкой – корпусом для уменьшения нагрузки на двигатели, путем снижения веса общей конструкции.
Ее изготавливают из полимеров или сплавов прочных, но легких. Кроме них широко используются стекловолокно, карбон и им подобные материалы, обеспечивающие максимальную жесткость конструкции. Несбалансированная рама будет портить траекторию не хуже сгоревшего двигателя, поэтому на нее нужно обращать пристальное внимание.
Чаще всего это крестовина по крайним точкам которой крепятся двигатели, а по центру – управляющий блок. Сверху и снизу она обычно укрывается корпусом, но есть модели, которые обходятся без него. Поэтому на нее будут крепиться все остальные элементы, в том числе и опорные шасси.
Плата управления квадрокоптером
Плата управления квадрокоптеромОдним из самых интересных компонентов, которое имеет устройство квадрокоптера, является плата управления квадрокоптером. От работы этой маленькой запчасти зависит стабильность полета, и, по сути, она является мозгом летающего аппарата. Его программируют и в результате получают систему управления, работающую под руководством оператора. При помощи шлейфа она соединяется с каждым мотором и подает на него управляющий сигнал (запрограммированную команду). Чем большее количество сигналов сможет обрабатывать плата, тем больше трюков сможет выполнять дрон, а, значит, эффектнее будет полет.
Набор датчиков подключается именно сюда. Акселерометр, барометр и даже GPS передают ей свои показания, которые она должна обрабатывать. Здесь же формируется и обратная связь с оператором через передатчик, установленный на корпусе.
Двигатели квадрокоптера
Двигатели квадрокоптераВвиду того что основная нагрузка приходится на двигатели, они являются одним из расходных материалов, которые обычно стоят на втором месте по «убиваемости» после винтов (пропеллеров). Если конструкция коптера разборная, то заменить их несложно, нужно лишь найти соответствующую модель, и молиться, чтобы подобные еще были в наличии. В противном случае придется менять сразу несколько, дабы не ухудшить полетные характеристики.
Больше всего проблем возникает с механическими частями двигателей. Если они открытые, внутрь может попасть мусор, например, песок при посадке, и повредить аппарат.
К каждому двигателю (всего 4) присоединяются пропеллеры по одному сверху или снизу в зависимости от конструкции.
Аккумулятор квадрокоптера
Аккумулятор квадрокоптераВажный элемент коптера – его аккумулятор. От его емкости (выражается в миллиампер часах) зависит, как высоко сможет подняться летательный аппарат, как долго и как далеко он сможет лететь. Миниатюрные модели держатся в воздухе не более 3-5 минут. Более продвинутые от 8 до 15. Абсолютного максимума достигает емкость у тех моделей, которые могут поднять в воздух 3-х или 4-баночный аккумулятор. Их полет продлится до 20 минут и более. При этом устройство также может питать камеру, подключенную к нему и не имеющую собственного аккумулятора.
Управление квадрокоптером
Управление квадрокоптеромОсобых сложностей в работе с аппаратом не возникает, если это хорошо спроектированное устройство с продуманной системой обработки сигналов, большим количеством датчиков и системой стабилизации на основе многоосевого гироскопа. Чем больше у него осей, тем аккуратнее будет управление и послушнее устройство квадрокоптера. При этом степень сложности может заключаться и в опытности оператора, занимающегося его перемещением в пространстве. Для этого используется аппаратура, иногда с трансмиттером и собственным аккумулятором (или питающаяся от батареек).
Купить квадрокоптеры DJI вы можете в нашем магазине — бесплатная доставка по России и СНГ, хорошие цены!
Видео обзор квадрокоптеров
kvadrokopters.com
что это такое, его предназначение, фото и цена коптера
Квадрокоптер — это самый простой вид мультикоптера, который приводится в движение 4-мя двигателями, с установленными на них винтами. Двигатели, которые расположены на лучах рамы напротив друг друга, вращаются в разные стороны – 2 по часовой стрелке, два – против. Таким образом создается подъемная тяга.
Принцип действия
Давайте разберемся с принципом действия подробнее. Коптер это аэродинамически абсолютно нестабильный аппарат. Стабильным его полет делает бортовой компьютер или полетный контроллер.
Для того, чтобы дрон накренился необходимо, чтобы два двигателя замедлили вращение, а два противоположных — наоборот увеличили. Например, если аппарат хочет свернуть влево, он ускоряет два двигателя на правой стороне рамы и замедляет два на левой стороне. Точно так же, если он хочет полететь вперед он ускоряет задние два мотора и замедляет два передних.
Коптер может повернуть (так называемое «рыскание») влево или вправо, ускоряя два двигателя, которые расположены по диагонали друг к другу, одновременно замедляя два других. Для перемещения доступны 3 оси — тангаж (pitch), крен (roll), рыскание (yaw). А также газ (Throttle).
Мультикоптеры
Существуют несколько видов мультикоптеров которые различают по количеству винтов/моторов (винты и моторы обычно называют винтомоторной группой или ВМГ). Помимо квадрокоптера выделяют – трикоптеры — 3 винта, гексакоптеры – 6 винтов, октокоптеры – 8 винтов.
Чем обусловлено количество моторов?
Во – первых безопасностью: при выходе из строя одного винта или мотора коптер рухнет на землю и разобьётся, гексакоптер сядет с минимальными повреждениями, окта – фактически не заметит потерю одного двигателя/винта.
Ниже на видео видно, как гексакоптер садится без существенных повреждений на 5 двигателях.
Во – вторых: полезную нагрузку гексакоптер способен взять бОльшую, за счет большей суммарной мощи двигателей.
Но есть у гексы/окты и минусы:
- Выше стоимость – рамы стоят дороже, большее количество двигателей, регуляторов оборотов (ESC) и винтов.
- Чтобы обеспечить сопоставимое время полета требуется батареи большей емкости.
Из каких элементов состоят?
Концептуально радиоуправляемый коптер состоит из двигателей, регуляторов оборотов, лопастей, рамы, полетного контроллера, батареи, радиоприемника и передатчика. На самом деле в нем гораздо больше модулей, о которых мы поговорим чуть ниже.
Полетный контроллер — это мозг вашего аппарта, именно он отвечает за поведение в полете. Как правило, полетный контроллер представляет собой плату или небольшую коробочку с микросхемой внутри. Современные полетные контроллеры, это сложные устройства, способные обрабатывать сигналы поступающие с множества различных устройств и самостоятельно принимать решения о выборе наиболее оптимальной траектории полета и избегать столкновения с препятствиями. Такие контроллеры установлены на DJI Mavic Pro и DJI Spark.
Как правило полетный контроллер состоит из четырех базовых датчиков:
- Акселерометр или датчик угловых скоростей;
- Гироскоп;
- Магнитометр или компас;
- Барометр — датчик атмосферного давления, который помогает удерживать высоту.
Управление осуществляется через радиопередатчик, он же пульт управления. Большинство передатчиков работают на частоте 2,4 ГГц, это своеобразный стандарт. Команды с передатчика поступают на радиоприемник который подключен к полетному контроллеру. Полетный контроллер обрабатывает полученный радиоприемником сигнал и передает команды двигателям. Таким образом можно сказать, что полетный контроллер управляет вращением двигателей, но делает это не напрямую, а через регулятор оборотов или ESC (Electric speed controller — электронный контроллер скорости).
В самом общем случае управляется коптер по 4-м каналам, которые как раз и есть упомянутые нами выше тангаж (pitch), крен (roll), рыскание (yaw) и газ (Throttle). Чтобы понять, как управляется дрон читайте основы управления.
Дополнительные модули
Современные модели помимо основных модулей содержат ряд вспомогательных таки как:
- GPS компас, для определения местоположения аппарата
- курсовая камера и видео передатчик для передачи изображения на экран пилота или на полетный шлем (так называемый полет от первого лица или FPV)
- гироскопический 2-х или 3-х подвес с камерой – который стабилизирует камеру, защищая ее от вибраций
- телеметрия или OSD (OnScreenDisplay) которая отвечает за вывод характеристик полета на экран монитора или полетного шлема
- датчики контроля высоты и облета препятствий
- wi-fi и Bluetooth модули

Для чего нужен квадрокоптер
Активное развитие и внедрение их в гражданскую среду, привели к росту вариантов использования:
- Пассажирские перевозки — так, в Дубаи, на международном саммите была продемонстрирована модель беспилотного такси Ehang 184, которое может находиться в воздухе около 30 минут за один полёт. По сути это одноместный восьми-роторный аппарат, который лишен каких-либо органов управления, т.е. фактически человек летит в этом аппарате в качестве пассажира, а не пилота. В небольшой кабине располагается кресло и планшет с сенсорным экраном, используя который вы можете указать пункт назначения. В 2018 году первый тестовый полет совершило аэро-такси Vahana компании Airbus. В феврале этого же года, сообщили о секретном аэро-такси Joby Aviation , стартап проекта уже привлек 100 млн долларов.
- Хозяйственная деятельность — дроны берут на себя отдельные функции авиации: проведение аэросъёмки или других видов сбора данных, нужных для сельского хозяйства, контроля ситуаций на дорогах и в любых удалённых участках. С их помощью отслеживают пути миграции животных, находят затерявшиеся суда, выявляют уровень гидрометеорологической опасности, проводят обследование линий электропередач.
- Развлекательные / спортивные шоу — такие аппараты чаще всего оснащаются несущими винтами и являются подобием вертолётов, а не самолётов. Данная конструкция наиболее рациональная, поскольку не требует наличия взлётно-посадочной полосы. Развлекательное использование БПЛА недавно расширилось воздушными гонками. Чаще всего для них используются модели самостоятельной сборки или существенно переработанные готовые. В результате они получают возможность набирать скорость выше 150 км/ч, но относятся к аппаратам с малыми габаритами. Отметим, что стартап Alauda Racing запустил на платформе Kickstarter сбор средств на первые в мире гонки на пилотируемых мультикоптерах, которые планируются в 2020 году.
- Профессиональная или любительская фотосъемка — все современные модели оснащаются высококачественной камерой и позволяют делать восхитительные снимки там, куда человек не смог бы никогда добраться самостоятельно.
- Грузовые перевозки — в 2016 году компания Amazon провела испытания по доставке посылок с помощью коптера и подала заявку на технологию доставки груза при помощи парашюта. В последние месяцы активно появляются новости с концептами больших грузовых беспилотников, способных перемещаться на высоких скоростях и перевозить до нескольких тонн. Как, например, модель Draco-2 компании Sabrewing Aircraft и тестовая сборка компании Boeing.
mirquadrocopterov.ru
Квадрокоптеры — что это такое и с чем их едят?
Ну что ж, откываю новый раздел — Мультикоптеры. На самом деле заниматься я в основном планирую квадрокоптерами, как самой простой конструкцией в этом семействе, но чем черт не шутит, может быть как-нибудь дойду и до гекса- или октакоптеров, поэтому пусть будет называться «Мульти». Эта статья — вступительная. В ней я постараюсь рассказать об основных моментах в построении мультикоптеров для тех кто с ними не знаком. Хочу сразу предупредить, что все мои знания — это пока что голая теория. Собственный квадрик я еще не построил, а только собираюсь к этому приступить на днях. Информации по этой теме много, поэтому не обсессудьте если я где-нибудь ошибусь — в этом случае прошу меня поправить или дополнить.
Что представляет собой мультикоптер? Это многороторный летальный аппарат в котором управление моторами осуществляется специальной платой электроники на основе сигналов с датчиков. Эта плата (в обиходе, «мозги» мультикоптера) автоматически контролирует скорость вращения каждого мотора в зависимости от положения аппарата в воздухе, внешних воздействий и сигналов управления. Бывают также и «безмозглые» мультикоптеры, но их строят скорее ради забавы, чем реальных полетов. Количество роторов мультикоптера может быть самым разным — от трех и более. В соответствии с этим количеством, мультикоптер получает приставку: три- квадро — пента- хекса — окта- и т. д.
Самая простая и распространенная конструкция — квадрокоптер. Трикоптер чуть посложнее, т. к. в его конструкции приходится делать задний винт с управляемым с помощью сервы наклоном, но зато он значительно маневренней. Количество винтов более четырех служит обычно для повышения надежности и грузоподъемности. Октакоптеры бывают как с 8 лучами, так и с 4, если винты расположены по соосной схеме — сверху и снизу, при этом эффективность их работы несколько уменьшается.
Итак, в чем прелести квадрокоптера и чем квадрокоптеры лучше вертолетов?
- Простота и надежность конструкции, неприхотливость в эксплуатации. В квадрокоптере нет никаких лишних движущихся частей — только электроника и моторы, ни одной сервы. При этом масса и момент инерции каждого винта значительно меньше, чем у лопастей вертолетов. Благодаря этому мультикоптеры на порядок дешевле вертолетов в эксплуатации. При аварии страдают обычно винты и рама (реже моторы), причем если рама сделана с умом и в ней предусмотрены специальные легко восстановимые зоны разрушения, то винты остаются единственной необходимой запчастью при авариях. Еще один плюс мультикоптеров — это их неприхотливость. Они без проблем летают в любую погоду.
- Свобода для творчества. Мультикоптеры не только дешевле в эксплуатации, но и предоставляют огромный простор для полета творческой мысли. На самом деле это очень важный пункт. Я знаю многих людей, которые забросили другие виды моделизма и полностью ушли в мультикоптеры просто потому, что им очень нравится их конструировать. Так что конструирование мультикоптеров — это еще одно из больших удовольствий от модельного хобби, наряду с ремонтом и, собственно, полетами. В отличие от вертолетов, где все более-менее стандартизировано и заточено под готовые рамы, здесь можно размахнуться по полной — самому выбрать формат, размер, компоновку, самому сделать раму, самому сделать мозги надергав датчиков из китайских джойстиков и прошив какой-нибудь подходящий микроконтроллер (если есть желание) и в итоге получить полностью уникальный аппарат, какого точно ни у кого больше нет, причем его летные качества можно постоянно совершенствовать экспериментируя с различными деталями и компонентами. Впрочем, если в Вас нет конструкторской жилки, можно просто купить комплект для сборки, или даже готовый вариант.
- Потрясающая стабильность и превосходные летные качества. Квадрокоптер с хорошими мозгами в полете стабильней даже чем соосник, при этом он гораздо более скоростной и маневренный, а также куда лучше справляется с ветром. Умные мозги позволяют по полной использовать самые различные дополнительные датчики, так что собрать беспилотный летательный аппарат на этой платформе проще чем на чем бы то ни было. Если же хочется экстрима — можно отключить стабилизацию и оторваться по полной!
- Большая эффективность конструкции. Вся тяга винтов идет на удержание модели в воздухе, каждый винт работает максимально эффективно, поэтому аккумулятора хватает на большее чем у вертолетов время, а также модель может нести больше полезного груза.
- Малые вибрации. Винтов много и они маленькие, поэтому вибраций у мультикоптера гораздо меньше, чем у среднестатистического вертолета. Это, а также два предыдущих пункта сделали мультикоптеры очень распространенным решением для съемки видео и ближних FPV полетов. Профессиональные мультикоптеры уже давно используются при съемках фильмов и репортажных фотографий с воздуха. Да даже некоторые «продвинутые» свадебные фотографы уже обзавелись этой техникой чтобы делать красивые облеты при съемке видео для свадьб. 🙂
В чем же недостатки многороторных систем?
- Во-первых, мультикоптеры больше похожи на НЛО или какого-нибудь насекомого, чем на привычный всем летающий аппарат. Не всем нравится управлять абстрактным непонятным летающим «нечто», к тому же у мультикоптеров часто возникают проблемы с определением положения носа.
- Во-вторых, большие габариты. Для улицы это не страшно, но очень неудобно при транспортировке. Проблему частично решают складные рамы.
- Ну и в третьих, обычные квадрокоптеры не могут летать в инверте по причине отсутствия коллективного шага лопастей, но это сложно назвать недостатком, т. к. каждому свое и мультикоптерам это просто не нужно, для этого есть вертолеты.
Купить квадрокоптер или собрать самому?
Я изначально планировал купить готовый комплект для сборки, но оказалось что собрать квадрик на простеньких хоббикинговских мозгах где-то в 2 раза дешевле, чем готовые решения и в итоге жаба перевесила. Вернее я решил что для начала сойдет и такой, а в дальнейшем уже видно будет. Продвинутые дорогие мозги для квадрокоптера тоже стоят недешево.
Итак, для тех кто стоит перед выбором какой купить квадрокоптер, могу озвучить 2 общепризнанных в народе лидера:
1. Квадрокоптер Gaui Квадрокоптер (Quad Flyer 330X-S) (в народе ласково именуемый «Гайкой»)
Небольшой квадрокоптер (диаметр по расстоянию до моторов — 330 мм), достаточно старая модель (хоть ее и обновили недавно, после чего она получила свою приставку -S). Достаточно простые мозги без акселлерометров и обилия датчиков, причем вряд ли их будут в дальнейшем дорабатывать и развивать. Тем не менее, этот коптер полюбился многим по причине своей неприхотливости, адской крашеустойчивости и, как ни странно (с учетом простых мозгов), весьма приличных полетных качеств.
2. Квадрокоптер Xaircraft X450
Младший брат квадрика Xaircraft X650, использующий те же самые мозги. Хороший качественный квадрокоптер с весьма продвинутыми мозгами, которые позволяют расширить его до восьмироторного аппарата и подключить большое количество дополнительных датчиков. Кроме того, работа над проектом еще продолжается и постоянно выходят новые версии и добавляются новые фичи. Для этого квадрокоптера в продаже имеется куча опциональных аксессуаров — складные рамы, подвесы для камер и наборы для апгрейда на старшую модель.
И тот и другой квадрокоптеры стоят приблизительно одинаково — в районе 400 долларов. Есть, конечно, и другие модели — Валкеровская серия «UFO», китайские квадрокоптеры Lotus и FeiYu, но их популярность значительно ниже и я не нашел про них никакой полезной информации на форумах.
[ad name=»heliblog_inside_square»]
Еще, как вариант, можно посмотреть в сторону Blade mQx или Parrot AR Drone первой или второй версии, но эти модели очень сильно отличаются по своему формату от того, что я сейчас рассматриваю, поэтому я и не включил их в список лидеров.
Если же Вы все же решились собрать квадрокоптер своими силами (а я предполагаю что ничего сложного в этом нет), то давайте посмотрим что нам для этого потребуется.
Из чего состоит конструкция квадрокоптера
Первым делом нужно определиться с форматом будущей модели (размер, число роторов, расположение, компоновка) и мозгами (от этого зависят возможности стабилизации, поддержка датчиков, возможности расширения, летные качества). Если Вы планируете использовать квадрик для съемки и FPV и точно знаете сколько и какого оборудования будете на нем таскать — неплохо бы сразу рассчитать конструкцию на перенос определенного полезного веса.
Рама
Достаточно важный элемент коптера, ведь от нее зависит компоновка узлов, внешний вид, эстетика, крашеустойчивость и удобство ремонта. Раму можно сделать самому, или купить готовый комплект для сборки, китайцы сейчас предлагают великое множество самых разнообразных рам. Рама квадрокоптера состоит из четырех лучей и крестовины на которой крепятся мозги. Материал лучей — обычно алюминиевые профили, карбоновые трубки, или дерево. Материал крестовины — пластик, карбон, текстолит или даже фанера. В самом наипростейшем случае можно собрать раму из двух деревянных реек и фанерки (слышал что такая конструкция даже летает 🙂 ). На мой взгляд самый простой и хороший вариант — алюминиевые профили и крестовина из текстолита выпиленного лобзиком. Рамы бывают также складные, это когда лучи сдвигаются друг к другу для переноски. Самый хороший вариант с точки зрения крашеустойчивости — когда лучи сдвигаются при падении и рама просто складывается без значительных поломок. Еще рамы бывают симметричными и со смещенной крестовиной. Несимметричные рамы позволяют вынести видеокамеру ближе к носу, делается это с той целью, чтобы в кадр не попадали пропеллеры передних лучей. Снизу рамы обычно монтируют какие-нибудь лыжи или ножки.
Мозги
Самый важный элемент мультикоптера, от них напрямую зависит поведение коптера в воздухе и его летные возможности. Сейчас существует огромное количество различных проектов, как профессиональных, так и основанных простыми энтузиастами. Я думаю обзор самых популярных систем электроники для коптеров займет слишком много времени, поэтому постараюсь как-нибудь уделить этому отдельную статью. Важный момент по установке мозгов — обычно они требуют размещения приблизительно на одном уровне с плоскостью вращения винтов в центре воображаемого круга проведенного через оси моторов. Другой важный момент — мозги обязательно требуют виброизоляции от рамы. Чем удачней она будет выполнена, тем проще им будет работать и тем стабильней будет летать квадрокоптер.
Моторы
Тут особых требований нет, подойдут любые бесколлекторные аутраннеры требуемой мощности с kV 800-1200 (меньше — для спокойных полетов, больше — для отжигов). Тем не менее больше всех популярны несколько конкретных моделей моторов, список которых можно найти на форумах.
Особо котируются низкопрофильные моторы (к сожалению не знаю как такой конструктив называется), правда они и стоят значительно дороже.
ESC ( Electronic Speed Controller, Электронный регулятор хода)
Вот к ESC предъявляются определенные требования. Во-первых, очень важно чтобы у наших ESC время отклика на изменение газа было минимальным — ведь от этого зависит точность контроля полета автоматикой. Во-вторых, у некоторых моделей ESC имеется защита от помех и при быстрых осцилляциях газа от платы управления ESC может принять скачки сигнала за помеху и просто отрубиться. В общем, тут просто лучше использовать проверенные на квадрокоптерах модели. Перед первым полетом необходимо провести специальную процедуру калибровки регуляторов. Как моторы, так и регуляторы лучше брать с запасом по количеству, поскольку нежелательно использовать на одной модели регуляторы и моторы разных серий. К сожалению, качество китайских регуляторов хода не всегда идеальное, а т. к. на квадрокоптере их стоит 4 штуки — вероятность выхода из строя одного из регуляторов многократно повышается. В случае отказа одного из регуляторов шансы плавно посадить квадрик не очень большие. В случае с гекса- и октакоптерами эта проблема практически исчезает. При подборе мощности регуляторов надо помнить что лишний запас мощности — это и лишний вес умноженный на 4. Поэтому лучше ограничиться минимально достаточным значением.
Пропеллеры
Для квадрокоптера нужны 2 парных пропеллера (2 пропеллера будут вращаться по часовой стрелке, 2 — против часовой). Особенность пропеллеров многороторных систем в том, что в отличие от пропеллеров самолетов, наши пропеллеры работают в условиях низкой скорости набегающего потока воздуха, поэтому пропеллеры для квадрокоптеров — узкие и с небольшим шагом винта. Лучше если они будут разных цветов — для обозначения переда и зада модели.
Крепить пропеллеры на моторы можно различными способами, о них я также расскажу чуть позже.
Соединительные провода, коммутация
У мультикоптеров очень много проводов, уложить их красиво — непростая задача. Немного облегчить этот процесс помогает специальна текстолитовая плата с разведенными дорожками питания на которую можно припаять все силовые провода и проводку бортовых огней. Также понадобятся соединительные провода для подключения приемника к мозгам.
Приемник
Упомянул просто чтобы не забыли что он нужен. 🙂
Опознавательные маркеры, навигационные огни
Симметричные квадрики выглядят со всех сторон одинаково, поэтому надо как-то помечать то место где у них перед. В светлое время суток для этого используют пропеллеры разных цветов, специальный шарик-маркер спереди аппарата и раскраску рамы. В темное (да и в светлое тоже, если солнце не сильно ярко светит) — специальные огни на раме. Вообще, огни на квадрокоптере — очень важный и эффектный элемент дизайна. Кроме того что они помогают определить положение аппарата в пространстве, они еще и придают ему НЛО-подобные визуальные свойства. 😀
[ad name=»heliblog_inside_square»]
Датчики, датчики, датчики
Минимально необходимый для полета комплект датчиков, который имеют все мозги — это 3 гироскопа. Они помогают удерживать модель от поворота по всем трем осям. Если мозги также имеют акселлерометры, тогда квадрик уже может самостабилизироваться в горизонт. Остальные датчики опциональны и перечисление их возможностей — также потянет на отдельную статью. Сейчас все зависит от ваших потребностей и финансов. Можно поставить датчики измеряющие высоту, температуру, давление, скорость относительно земли, скорость относительно ветра, положение горизонта, направление на север, направление на пилота, расстояние до предметов, сдвиг относительно привязки к изображению, координаты по GPS. Может и еще что-то, я эту тему пока не очень хорошо изучил. Комплекты OSD, телеметрии и автопилота — еще одна подробная тема для разговора.
Полезные мелочи
Сюда можно отнести, например, индикатор разряда аккумулятора (если нет OSD и телеметрии), а также какую-нибудь девайсину для поиска упавшей вдалеке модели .
Корпус (защитная крышка)
Мозги квадрика — это обычная электронная плата (или даже несколько), поэтому ее очень желательно защитить от внешних воздействий. Для этих, а также для эстетических целей и служит защитная крышка-корпус. Тут все зависит от фантазии владельца, используют все, что попадется под руку — коробки от CD дисков, пластиковую посуду, обрезки канистр и т. д. 😀
Крепеж (подвес) камеры
Если на вашем квадрике будет установлена камера, то надо подумать о ее крепеже. В простейшем варианте — это, конечно, просто жесткая фиксация. В более сложном — управляемый подвес, в еще более сложном — управляемый подвес с отдельной электроникой для автостабилизации. Этот узел обычно размещают снизу между лыжами мультикоптера, которые при этом значительно удлиняются в высоту.
Вот вроде бы и все что понадобится. Какие моменты я еще забыл упомянуть? Квадрокоптеры бывают двух схем: + и х. У квадрокоптера схемы + перед модели приходится аккурат на один из винтов, у квадрокоптера схемы х — на середину между винтами. Для съемки видео по понятным причинам используется x-конфигурация, поэтому себе я буду собирать именно ее.
При компоновке деталей квадрика нужно стремиться к тому, чтобы центр тяжести также приходился на середину диаметра круга моторов и был как можно больше собран в одну точку, чтобы уменьшить момент инерции лучей аппарата. Чем меньше вибраций будет создавать аппарат, тем стабильней он будет держаться в воздухе, поэтому моторы желательно также крепить не жестко, а через какой-нибудь промежуточный элемент гасящий вибрации, а сами моторы и пропеллеры динамически балансировать.
Резюме
Если большие уличные вертолеты слишком сложны и дороги для Вас, если в Вас горит тяга к творчеству и съемке красивых видео, если руки чешутся собрать что-нибудь самому и если Вас не пугает управление непонятным жукообразным НЛО — попробуйте квадрокоптеры. 🙂 Причем, данный класс радиоуправляемых летающих моделей можно рекомендовать даже для абсолютных новичков в пилотировании.
heliblog.ru
что это такое и как работает?
Радиоуправляемые летательные аппараты приобрели широкую популярность на рынке. Но остается еще немало людей, которые не знают, что это такое квадрокоптер? Он представляет собой летательный аппарат, движение которого обеспечивается за счет вращения специальных пропеллеров.
Как работает квадрокоптер
Летательный аппарат или как его еще называют дрон, имеет достаточно простую конструкцию. Принцип работы квадрокоптера заключается в регулировании скорости при помощи двигателей, оснащенных пропеллерами. У коптера есть четыре пропеллера, причем два из них двигаются по часовой стрелке, а два других – против нее. Таким образом, благодаря замедлению одних двигателей и ускорению других он получает возможность использовать осевое вращение для поворота в правую либо левую сторону.
Чтобы двигаться в горизонтальном направлении квадрокоптер увеличивает тягу с одной стороны и соответственно уменьшает ее со второй. Скорость движения в определенном направлении зависит от угла наклона. Если полет происходит при сильном ветре, то квадрокоптер автоматически наклоняется по направлению движения. Это дает возможность компенсировать воздушные порывы.
Принцип работы квадрокоптера строится на использовании электронных гироскопов, которые определяют уровень. Кроме того, он оснащен акселерометрами, измеряющими уровень смещения по осям. А изменение высоты и скорости полета достигается за счет замедления или соответственно ускорения работы двигателей.

Из каких элементов состоит дрон
Новичков также интересует вопрос что это такое квадрокоптер, и особенности его конструкции. Итак, из чего состоит квадрокоптер:
- рама, составляющими элементами которой считаются пластиковая крестовина и четыре алюминиевых луча. Она является достаточно важной слагающей, поскольку именно от рамы зависит внешний вид коптера и расстановка узлов;
- плата-контроллер считается самым важным элементом дрона. Ведь именно она определяет функциональные возможности устройства. Плата должна быть расположена на одном уровне с винтами. Кроме того, она должна чувствовать виброизоляцию от рамы. Чем лучше расположена плата, тем стабильнее будет полет квадрокоптера;
- мотор. Подойдут любые бесколлекторные модели с мощностью от 800 до 1200 kV;
- электронный регулятор хода, сокращенно ESC. Этот элемент должен соответствовать некоторым требования. Прежде всего, изменение газа должно сопровождаться минимальным временем отклика. Кроме того, некоторые модели оснащены защитой от помех. Нередко они воспринимают резкие скачки сигнала в качестве помехи и автоматически прекращают работу. Поэтому рекомендуется приобретать уже проверенные на практике ESC;
- пропеллеры. Для дрона требуется по два парных пропеллера. В отличие от авиационных они достаточно узкие и имеют небольшой шаг винта;
- соединительные провода. У квадрокоптера большое количество разнообразной коммутации. Чтобы разместить ее красиво и одновременно функционально понадобится специальная плата, на которой уже есть разведенные дорожки питания;
- приемник;
- навигационные огни, помогающие определить местоположение дрона в темное время суток;
- датчики. Их минимальный набор состоит из трех гироскопов, которые дают возможность уравновесить аппарат в процессе движения. Если у модели предусмотрен акселератор, то дрон самостоятельно может принять горизонтальное положение в процессе полета. Существуют также и другие датчики, определяющие высоту, скорость полета, интенсивность ветра, расстояние до предметов и т. д.;
- полезные мелочи. К ним можно причислить девайс, который облегчает поиск упавшего квадрокоптера;
- корпус, обеспечивающий защиту платы от внешнего воздействия;
- крепеж для видеокамеры.
Следует заметить, что все элементы, из чего состоит квадрокоптер, необходимо грамотно расположить, чтобы обеспечить максимальную устойчивость устройства.

Какие бывают виды квадрокоптеров
Классификация квадрокоптеров осуществляется сразу по нескольким параметрам. Прежде всего, в зависимости от наличия видеокамеры различают дроны с камерой и без нее. Также их можно поделить на профессиональные и любительские. Для изготовления первых используются высококачественные материалы, к примеру, углеродное волокно. Они укомплектованы современными компасами, контроллерами, различными сенсорами и другими девайсами.
Многие дроны обладают специальными подвесками для стабилизации аппарата во время полета. Что касается видеокамер, то применяется достаточно широкий диапазон разнообразных вариантов – от достаточно простых моделей до профессиональных камер стоимостью несколько тысяч долларов.
В большинстве случаев профессиональные дроны применяются для ведения видеосъемки с высоты птичьего полета. Их стоимость начинается от нескольких тысяч долларов.
Классификация квадрокоптеров также предполагает выделение из их массы любительских моделей. Они предназначены для любителей радиоуправляемых летательных аппаратов. Достаточно часто в их комплектацию не включена камера, и все функциональное предназначение устройства сводится к простому пилотированию дрона. Если камера все же присутствует на такой модели, то качество записи оставляет желать лучшего. Стоимость таких коптеров начинается от нескольких десятков и заканчивается несколькими сотнями долларов.
В зависимости от предназначения различают следующие виды дронов:
- квадрокоптер, ориентированный на ведение профессиональной съемки;
- гоночный коптер;
- уличный дрон, оснащенный передающей камерой;
- домашний квадрокоптер. Он вполне может уместиться на ладони взрослого человека и используется исключительно в закрытых помещениях.

kopterinfo.ru