История квадрокоптеров. От Георгия Ботезата до наших дней.
Первый радиоуправляемый квадрокоптер такой, каким мы его знаем, появился в начале двухтысячных. И хотя многие уверены, что это современное изобретение, появившееся буквально в нашем веке, это не так: начальные прототипы этих гаджетов появились уже в начале 20 века. В этой статье мы расскажем о истории появления квадрокоптеров, от первых летающих четырехвинтовых аппаратов до наших дней.
Для начала разберемся в устройстве дронов. Квадрокоптер — это миниатюрный вертолет с четырьмя несущими винтами, разделенных по центру балками. Все винты оснащены индивидуальным двигателем, приводное действие контролирует система микропроцессоров и три гироскопа, дающие сбалансированное положение коптера в воздушном пространстве. Для предотвращения нежелательных наклонов и разворотов аппарата при полете, часть винтов движется в одну сторону, а другая часть – в противоположную. За счет этого компенсируется крутящий момент. Направление и высота полета дрона регулируется радиоуправлением с помощью пульта или проходить в автономном режиме по маршруту, заблаговременно прописанному в бортовом компьютере.
Георгий Ботезат и первый полет.
Один из родоначальников такого вертолета, был аппарат Ботезата, взлетевший в воздух еще в 1922 г. Георгий Александрович Ботезат – американец с корнями из России, он был инженером электромонтажных работ, изобретателем и профессором Петроградского технологического института. В одном из экспериментальных полетов аппарат Ботезата смог поднять в воздух груз весом 450 кг на высоту 4 метра.
Предпосылки появления современных коптеров начались на заре вертолетостроения — в 1920-х г. В те дни над одной и той же идеей думали двое, каждый сам по себе: это были Этьен Эмишен, французский инженер и Ботезат. Удивительно, но они оба почти одновременно сконструировали четырехвинтный вертолет, где все разнесенные винты приводились в движение единым двигателем с помощью трансмиссионной системы. Для обеих моделей проводились испытательные полеты, в результате которых аппараты поднялись в воздух на высоту от 5 до 15 метров и пролетели около 1 километра. Но на этапе тестирования, дело застопорилось. Причиной этому стало:
• выходящая из строя и не особо надежная система трансмиссии, которая передавала крутящий момент с двигателя на роторы
• в аппарате Эмишена использовалось восемь пропеллеров, в то время как модель Ботезата могла двигаться исключительно благодаря попутному ветру.
Обе модели не имели баланса в пространстве при полете, особенно при сильном ветре из-за отсутствия системы воздушной стабилизации. И несмотря на то что по дате изобретения первый квадрокоптер в мире был рук Этьена Эмишена, его модель не считается уверенным прообразом современного коптера.
В 1922 г было положено начало испытаниям одного из первых четырехвинтных дронов. Такая система с большим количеством винтов упрощала управление: для того, чтобы повернуть аппарат, нужно было лишь изменить положение носовой его части. И кто бы мог подумать, в конструкции лопастей использовались растяжки… рояльных струн.
Только в 50-ых несколько производителей сконструировали аналогичные квадролеты в качестве опытных образцов. Но наиболее полноценный вариант летательного устройства разработал все же Ботезат, это был квадрокоптер, управляемый несущими винтами.
Летающий «автомобиль» для армии США.
Еще одним удачным изобретением можно считать модель VZ-7, разработанный фирмой Сurtiss-Wright,
В1958 году в ходе испытательных полетов он заявил о себе как стабильно работающий и хорошо управляемый, но американская армия не приняла его к эксплуатации из-за слишком маленького количества функциональных опций.
На данном этапе все работы по конструированию и усовершенствованию квадрокоптеров были заморожены, и решение продолжить развитие этой темы возникло спустя половину века, только в новом тысячелетии.
Спустя пятьдесят лет с момента пробных полетов первых квадролетов, интерес к этой теме возобновился, поскольку появились благоприятные для этого условия:
• появились прочные и легкие полимерные материалы, позволяющие значительно снизить вес аппарата
• развитие микроэлектроники помогло устройству управления аппаратов с винтами стать более удобным и стабильным.
Первые коммерческие дроны для аэросъемки.
В таком виде, какие они есть сейчас коптеры стали выглядеть в 2006 г, это были модели производства Германии компании MikroKopter. Они имели ряд усовершенствований и опций, позволяющих достичь стабильности при полете, фиксации позиции и предназначались для профессионального использования. Радиоуправляемый аппарат фирмы MikroKopter был не дешевым, и благодаря тому, что он имел открытый исходный код, вскоре появилось множество его более дешевых аналогов, которые себе мог себе позволить приобрести, практически каждый.
Усовершенствование системы стабилизированной подвески позволило устанавливать на коптер фото- и видеокамеру, чтобы при этом присоединенное оборудование находилось в строгой фиксации, способствовало тому, что дроны начали массово и повсеместно продаваться.
Помимо этого, такой апгрейд значительно увеличил качественные характеристики аэросъемки с коптеров, и именно благодаря этой технологии они сегодня широко применяются в рекламных съёмках, киносъемках, военных разработках и прочих сферах.
Далее развитие темы дронов с четырьмя винтами имело два пути:
• изготовление полноценных устройств для видеосьемки – от недорогих игрушек до платформ для видеосъемки и других профессиональных сфер. Обычно, в комплекте идет аппарат и собственная линейка микроконтроллеров и программного обеспечения к ним.
• отдельное производство микроконтроллеров и программного обеспечения для них, которые можно адаптировать к самодельным или приобретенным в магазине коптерам, что дает возможность всем любителям моделирования дронов, самостоятельно сконструировать свой вариант системы.
Будущее индустрии.
История создания и развития коптеров не ограничивается развлекательными целями и узкоспециализированным применением. В Саудовской Аравии планируется запуск автоматического беспилотного такси на базе летающего дрона. Разрабатываются модели военных машин, используемых как для разведки, так и в боевых действиях.
Поэтому все только начинается 🙂
Если интересует история появления квадрокоптеров, то можно посмотреть еще пару статей на нашем сайте: про историю аэрофотосъемки в России и про ее более поздний период — внедрение аэрофотосъемки в Советском Союзе.
aero-b2b.ru
Квадрокоптер Википедия

Мультикоптер (англ. Multirotor, multicopter, многороторный вертолёт, многолёт) — это летательный аппарат построенный по вертолётной схеме с тремя и более несущими винтами[1].
История
Многовинтовые вертолёты разрабатывались ещё в первые годы вертолётостроения. Один из первых квадрокоптеров (англ. quadcopter, четырёхроторный вертолёт), который реально оторвался от земли и мог держаться в воздухе, был создан Георгием Ботезатом и испытан в 1922 году. Недостатком этих аппаратов была сложная трансмиссия, передававшая вращение одного мотора на несколько винтов. Изобретение рулевого винта и автомата перекоса положило конец этим попыткам. Новые разработки начались в 1950-е годы, но дальше прототипов дело не продвинулось.
Новое рождение мультикоптеры получили в XXI веке, уже как беспилотные аппараты. Благодаря простоте конструкции квадрокоптеры часто используются в любительском моделировании[2]. Мультикоптеры удобны для недорогой аэрофото- и киносъёмки — громоздкая камера вынесена из зоны действия винтов[источник не указан 141 день].
Самолёт Curtiss-Wright X-19 использует при взлёте и посадке принцип квадрокоптера
Модель транспортного средства-гексакоптера
Октокоптер для персональных полётов
Принцип действия
По принципу управления мультикоптеры бывают[3]:
- автономные
- дистанционно-управляемые (беспилотные)
Мультикоптеры имеют 3 или более винтов постоянного шага (автомата перекоса, в отличие от одно- и двухвинтовых аппаратов, нет). Каждый винт приводится в движение собственным двигателем. Половина винтов вращается по часовой стрелке, половина — против, поэтому рулевой винт мультикоптеру не нужен. Маневрируют мультикоптеры путём изменения скорости вращения винтов. Например:
- ускорить все винты — подъём;
- ускорить винты с одной стороны и замедлить с другой — движение в сторону;
- ускорить винты, вращающиеся по часовой стрелке, и замедлить вращающиеся против — поворот.
Микропроцессорная система переводит команды радиоуправления в команды двигателям. Чтобы обеспечить стабильное зависание, мультикоптеры в обязательном порядке снабжают тремя гироскопами, фиксирующими крен аппарата. Как вспомогательный инструмент, иногда, также используется акселерометр, данные от которого позволяют процессору устанавливать абсолютно горизонтальное положение, и бародатчик, который позволяет фиксировать аппарат на нужной высоте. Также, применяют сонар для автоматической посадки и удержания небольшой высоты, а также для облёта препятствий. И самое главное — GPS-приемник, позволяющий записывать маршрут полёта заранее, с компьютера, а также, возвращать аппарат в точку взлёта, в случае потери управляющего радиосигнала, или снимать параметры полёта оперативно или потом
Существуют также трёх- и пятивинтовые вертолёты (три- и пентакоптеры). Один из моторов там располагается на нанизанной на ось подвижной платформе, угол поворота которой изменяется сервоприводом — так и осуществляется поворот аппарата вокруг своей оси [5]. Отдельно стоит отметить экспериментальные аппараты: бикоптеры, квадрокоптеры с изменяемым шагом пропеллеров, квадрокоптеры с двигателями на импеллерах, однако они не получили какого-либо распространения.
По вариантам размещения винтов в отношении оси движения и в зависимости от их направления вращения различают несколько типов мультикоптеров:
Современное применение мультикоптеров
Современное применение мультикоптеров весьма разнообразно, от игрушек и любительских средств для фото- видеосъёмок, контрабанды товаров, до пассажирских и грузовых транспортных средств, боевых роботов[6][7][8][9].
В любительских и профессиональных мультикоптерах используются коллекторные и бесколлекторные электродвигатели и литий-полимерные аккумуляторы в качестве источника энергии[10]. Винты могут быть установлены непосредственно на вал двигателя, либо через редуктор.
Это накладывает определённые ограничения на их полётные характеристики: типичная масса мультикоптера составляет от 1 до 4 кг, при времени полёта от 10 до 30 минут (30—50 минут у уникальных единичных экземпляров). Поднимаемый полезный груз моделями мультикоптеров среднего размера и грузоподъёмности — от 500 г до 2—3 кг, что позволяет поднять в воздух небольшую фото или видеокамеру (обычно экшн-камера в более дешёвых моделях, либо зеркальные камеры в профессиональных). Существуют и достаточно крупные модели мультикоптеров, с количеством роторов порядка 6-8 (гекса и октокоптеры), способные поднять в воздух груз массой до 20-30 кг. Для увеличения грузоподъёмности применяют соосное расположение несущих роторов, что в случае гексакоптера, например, даёт 12 моторов и 12 пропеллеров, расположенных попарно на 6 несущих лучах. Скорость полёта мультикоптера может быть от нуля (неподвижное висение в точке) до 100—110 км/ч. Запас энергии батарей позволяет отдельным моделям мультикоптеров улетать на расстояние до 7-12 км, на практике же радиус действия (максимальное расстояние, на которое они способны улететь с последующим возвратом в точку взлёта) обычно ограничено прямой видимостью (100—200 м при ручном управлении) либо дальностью действия аппаратуры радиоуправления и видеолинка. При этом лучшие образцы подобной аппаратуры, использующие усилители мощности радиосигнала и систему направленных антенн, способны обеспечивать стабильные радиоуправление и видеолинк на расстояния до 100 км. Таким образом, наибольшее ограничение на радиус действия мультикоптеров накладывает именно время полёта.
Эти ограничения приводят к тому, что мультикоптеры обычно используются как аппараты «ближнего радиуса действия»: для любительских полётов недалеко от себя, для фото-видеосъёмки близко расположенных объектов и так далее. Для сравнения, беспилотные самолёты с аккумулятором аналогичной ёмкости могут улетать на 10—15 км при высоте полёта 1—2 км.
Миниатюрный квадракоптер передающий изображение со встроенной камеры на смартфон по Wi-Fi
Миниатюрный квадракоптер, с пультом упраления с возможностью установки планшета как приёмника видеосигнала
Квадрокоптер для профессиональных фотосъёмок с креплениями для цифровых фотоаппаратов
Квадрокоптер визуального контроля окружающего пространства для силовых структур «Грифон-41»
Экспериментальный квадрокоптер «Ehang 184»
Прототип волокоптера «2X»
Безопасность полётов
В отличие от самолёта, который способен планировать с выключенным двигателем, или вертолёта, который способен сесть с помощью авторотации, мультикоптер при отключении моторов или электропитания, полностью неуправляем. Квадрокоптер при отказе одного из двигателей может сохранять стабилизацию. Гексакоптер или октокоптер помимо этого могут совершить мягкую посадку с одним неработающим мотором, однако не во всех случаях (например, при разрыве хотя бы одной лопасти вибрация из-за дисбаланса увеличивается настолько, что контроллер перестаёт работать, и аппарат переходит в неуправляемое падение). Но уже существуют экспериментальные квадрокоптеры, которые могут стабилизировать полёт и совершить посадку при потере одного из двигателей[11].
Учитывая то, что мультикоптер имеет немалую массу, жёсткий корпус и быстро вращающиеся пропеллеры, его столкновение с людьми или автотранспортом может привести к негативным последствиям. Поэтому полёты над людьми или автодорогами не рекомендуются. Желательно планировать траекторию полёта так, чтобы в случае необходимости (например, при разрядке батареи) внизу было место для безопасной посадки.
Важен и человеческий фактор. Современный полётный контроллер по сложности настройки и количеству полётных режимов почти не уступает настольному компьютеру. Невнимательное чтение документации, отсутствие выполнения необходимых действий (например, калибровки компаса при настройке) могут привести к неуправляемому полёту и потере аппарата. Вылет аппарата за радиус действия пульта при отсутствии режима GPS-возврата также является одной из причин потерь аппаратов.
В целях безопасности некоторые модели дистанционно управляемых мультикоптеров оборудуют дублирующими системами навигации и позиционирования, элементами интеллектуальной роботизации способствующими самостоятельному определению летательным аппаратом препятствии на маршруте полёта и их облёту, защитными кожухами винтов или всего летательного аппарата, самостоятельным возвратом к месту пуска при утере сигнала управления[12][13][7][10].
Мультикоптеры-игрушки
В последнее время появились миниатюрные квадрокоптеры, умещающиеся на ладони (Walkera Ladybird, WLtoys V929, Blue Arrow nano Loop и пр). Они практически безопасны (масса аппарата около 40 г), в то же время, позволяют получить основные навыки полёта на мультироторном аппарате, так как принцип их управления ничем не отличается. Квадрокоптеры такого размера возможно запускать дома, не рискуя нанести вред людям или предметам.
Миниквадрокоптер с зарядкой через USB
Квадрокоптер «Robbe Blue Arrow Nano Loop»
Миниквадрокоптер с пультом управления
Октокоптер в полёте
Квадрокоптер Parrot AR.Drone 2.0 с управлением по Wi-Fi при помощи смартфонов/планшетов вместо пульта упраления
См. также
Примечания
Литература
- Яценков В. С. Электроника. Твой первый квадрокоптер. Теория и практика // СПб.: БХВ-Петербург. — 2017. — 256 с. ISBN 978-5-9775-3586-1.
Ссылки
wikiredia.ru
Квадрокоптер — это… Что такое Квадрокоптер?
Квадрокоптер (он же квадролёт, англ. Quadrotor, quadrocopter, четырёхроторный вертолет) — это летательный аппарат с четырьмя роторами, вращающимися диагонально в противоположных направлениях. Обобщенное название аппаратов подобного типа, с произвольным количеством роторов — мультикоптер.
Многовинтовые вертолёты разрабатывались ещё в первые годы вертолётостроения. Недостатком этих аппаратов была сложная трансмиссия, передававшая вращение одного мотора на несколько винтов. Изобретение хвостового винта и автомата перекоса положило конец этим попыткам. Новые разработки начались в 1950-е годы, но дальше прототипов дело не продвинулось.
Новое рождение мультикоптеры получили в XXI веке, уже как беспилотные аппараты. Благодаря простоте конструкции квадрокоптеры часто используются в любительском моделировании.[1] Мультикоптеры удобны для недорогой аэрофото- и киносъёмки — громоздкая камера вынесена из зоны действия винтов.
Принцип действия
Мультикоптеры имеют как чётное (2, 4, 6, 8, 10 или даже 12) , так и нечётное (3, 5) число винтов постоянного шага (автомата перекоса, в отличие от одно- и двухвинтовых аппаратов, нет). Каждый винт приводится в движение собственным двигателем. Как правило, половина винтов вращается по часовой стрелке, половина — против, поэтому хвостовой винт мультикоптеру не нужен. В некотором роде исключение составляет трикоптер: один из моторов там располагается на нанизанной на ось подвижной платформе, угол поворота которой изменяется серво-приводом — так и осуществляется полет в стороны[источник не указан 52 дня] . И тем не менее, для всех аппаратов характерно маневрирование, путем изменения скорости вращения винтов. Например:
- Ускорить все винты — подъём.
- Ускорить винты с одной стороны и замедлить с другой — движение в строну.
- Ускорить винты, вращающиеся по часовой стрелке, и замедлить вращающиеся против — поворот.
Микропроцессорная система переводит команды радиоуправления в команды двигателям. Чтобы обеспечить стабильное висение, мультикоптеры в обязательном порядке снабжают тремя гироскопами, фиксирующими крен аппарата. Как вспомогательный инструмент, иногда, также используется акселерометр, данные от которого позволяют процессору устанавливать абсолютно горизонтальное положение, и бародатчик, который позволяет фиксировать аппарат на нужной высоте. Также, применяют сонар для автоматической посадки и удержания небольшой высоты, а также для облета препятствий. И самое главное — GPS-приемник, позволяющий записывать маршрут полета заранее, с компьютера, а также, возвращать аппарат в точку взлета, в случае потери управляющего радиосигнала, или снимать параметры полета оперативно или потом.[2]
См. также
Примечания
Ссылки
dic.academic.ru
Краткая история квадрокоптеров
Квадрокоптеры или вертолеты с четырьмя роторами, управляются воздушными потоками четырёх пропеллеров. Первый пилотируемый квадрокоптер был создан в начале 1920-х годов. Он был спроектирован как альтернатива вертолету, упоминания о котором прослеживаются ещё со времён древнего Китая.
Но целый ряд проблем с производительностью, ограниченным контролем и низкой стабильностью, привели к прекращению дальнейшего развития.
В наше время квадрокоптерам был дан второй шанс, проявить себя, они получили возрождение в виде БПЛА (беспилотных летательных аппаратов).
Что такое БПЛА?
БПЛА или беспилотник, это машина, которая может быть поднята в воздух и управляема дистанционно с помощью компьютера или пульта управления. Как следует из названия, он является беспилотным, подразумевая, что не имеет на борту пилота, штурмана, или инженера.
На сегодняшний день, БПЛА могут иметь миниатюрные габариты, легкие и маневренные, они способны выполнять небезопасные для человека задания. Некоторые из них предназначены для работы в закрытых помещениях, например — тоннели, канализационные трубы и т.д.
Каковы преимущества использования квадрокоптеров в качестве БПЛА?
Они имеют высокую ремонтопригодность, в отличие от традиционных вертолетов, есть только одна движущаяся часть — ротор. Остальная часть машины является статическим элементом. Таким образом, квадрокоптер имеет гораздо более упрощенный дизайн, чем подобные летательные аппараты. Большинство малых квадрокоптеров используют корпус, имеющий защиту роторов и лопастей. В случае контакта с препятствиями, что делает их более прочным по сравнению с другими БПЛА. Квадрокоптеры используют более короткие лопасти, чем у вертолета. Несущие винты работают на низких скоростях, вызывая меньший коэффициент трения. Это позволяет признать, что квадрокоптер является более безопасным, для использования в сложных полётных ситуациях, чем другие летательные аппараты.
Как работает квадрокоптер?
Квадрокоптер использует четыре лопасти для создания подъёмной силы. Путем изменения скоростных характеристик каждого в отдельности воздушного винта, производится управление маневренностью аппарата в воздухе. Пропеллеры расположены в конфигурации из двух пар, одна пара вращается по часовой стрелке, в то время как вращение другой происходит против часовой стрелки.
Для того, чтобы осуществлять движение вперед, фронтальные винты замедляются, в результате чего нос квадракоптера опускается вниз. Изменённый угол воздушного потока толкает БПЛА вперед. Аналогичное замедление скорости задних винтов, приведет движение воздушного корабля в обратном направлении.
Маневрируя скоростями лопастей вращающихся по часовой стрелки и реверсных винтов можно вызывать разворот квадрокоптера.
Для подъёмной вертикальной тяги, все четыре пропеллера должны работать с одинаковой скоростью.
Как используется квадрокоптеры?
Традиционно БПЛА использовались военными для разведывательной деятельности и обеспечения топографической рекогносцировки.
Поскольку технологии продвигаются вперёд и они стали более доступными, БПЛА в настоящее время широко используются в «гражданских» операциях. Пожарные используют беспилотники в тушении пожаров, нефтяные разведчики для сканирования участков земли в поисках нефти. Полиция также начала использовать беспилотные летательные аппараты для проведения визуального наблюдения.
Благодаря простоте конструкции появились доступные по цене БПЛА для массового использования. Теперь это приобретает масштабы популярного хобби, игрушки и даже заработка среди обывателей. Недорогие беспилотники со встроенными видеокамерами и различным дополнительным обвесом весьма востребованы на рынке. Управление квадрокоптерами стало доступно смартфон приложениями, которые позволяют БПЛА пилотироваться с помощью устройства на основе ОС IOS или Android.
Будущее квадрокоптеров
Как показывают исследования, технологическое развитие позволит уменьшать габариты, увеличит маневренность и приведёт к удешевлению производства. Потенциальные возможности использования беспилотных летательных аппаратов бесконечны.
Будущее выглядит ярким для квадрокоптеров. У них есть потенциал, чтобы значительно изменить жизнь человека к лучшему.
Купить отличные квадрокоптеры вы можете в нашем магазине — бесплатная доставка по России и СНГ, хорошие цены!
kvadrokopters.com
Квадрокоптеры — как все начиналось?
Современный квадро (гекса, окто) коптер — это достаточно мощное «вычислительное» устройство, способное управляться со смартфона по WiFi, зависать в одной точке, летать по маршруту и пр. Купить такой аппарат сейчас может любой желающий. А с чего все начиналось?
Как летает квадрокоптер?
Чтобы понимать суть технических решений, разберемся немного как вообще квадрокоптер летает. По сути, квадрокоптер — это неустойчивая система. Если взять 4 мотора, и просто подключить их к батарейке, квадрокоптер никуда не полетит, он просто перевернется т.к. сила тяги моторов никогда не будет идентичной. И тут вступает в действие электроника. На борту квадрокоптера есть центральная «плата управления», ключевой частью которой является блок датчиков. В простейшем случае, это трехосевой гироскоп. Микроконтроллер постоянно считывает данные с гироскопов, и как только гироскоп «чувствует» наклон по какой-либо оси, контроллер дает соответствующему двигателю команду чуть-чуть увеличить или уменьшить обороты, чтобы компенсировать наклон. В общем-то и вся логика — за исключением кучи всего (ПИД-регуляторов, теории управления, фильтров Калмана), ничего сложного тут нет (шутка). Ну а для пользователя все действительно прозрачно. Никаких движущихся частей кроме моторов, в квадрокоптере нет, все управление происходит исключительно изменением вращения оборотов моторов (с поворотами аналогично — изменяем скорости вращения, получаем вращающий момент). А теперь вернемся к истории.
Осторожно, траффик.
MikroKopter
Легендарная немецкая компания, благодаря инженерам которой в 2006 году появился первый аппарат. Контроллер имел на борту процессор Atmega644 c 4Кбайт памяти и частотой до 20МГц, 3 гироскопа по каждой из осей, акселерометр (для возможности горизонтального полета) и барометр для удержания высоты (точность барометра MPX4115A около 1м). Позже появились дополнительные модули, например GPS для удержания позиции.
Сейчас в youtube можно найти видео, как примерно все это летало (2007 год).
В целом система оказалась весьма удачной. Их продукция никогда не была дешевой, ценник начинался где-то от 1500Евро. Фирма существует и сейчас, они производят профессиональные аппараты, ценовая категория соответствующая. И еще один важный момент — первоначально, создатели Микрокоптер сделали исходный код открытым. Разумеется, уже в скором времени стали появляться различные клоны (в том числе производимые и в РФ), это конечно негативно сказалось на продажах, и код потом закрыли. Но все-таки, думаю это послужило большим толчком к созданию различного вида мультикоптеров.
У нас MikroKopter не был популярен из-за цены, и владельцев было не так уж много. Однако толчок мировому сообществу был дан, и различные системы стали появляться.
KaptainKuk
Одна из самых простых систем, выпускаемых (в различных версиях) с 2010 года и до сих пор. Плата управления имеет только 3 гироскопа, для регулировки параметров используются обычные переменные резисторы.
(Фото с сайта Hobbyking.com)
Такая плата сейчас стоит всего около 15$, как можно видеть, на борту кроме гироскопов и слабого процессора, в общем-то ничего и нет. Прошивки в исходных кодах для KK свободно доступны в Интернете, желающие могут скачать их, набрав в поиске гугла имя файла «kk2_1V1.zip» (размер всего 90Кб). Наверное, это первая и последняя версия прошивки какого-либо коптера, написанная на ассемблере.
MultiWii
Следующей вехой в развитии коптеров стала система MultiWii. Название пошло от игрового манипулятора Nintendo Wii и Wii Nunchuk, которые умельцы разбирали, и выпиливали оттуда плату с датчиками. В качестве центрального процессора использовалась Arduino Nano.
Внешний вид платы получался примерно такой (фото с сайта rcgroups, 2010 год):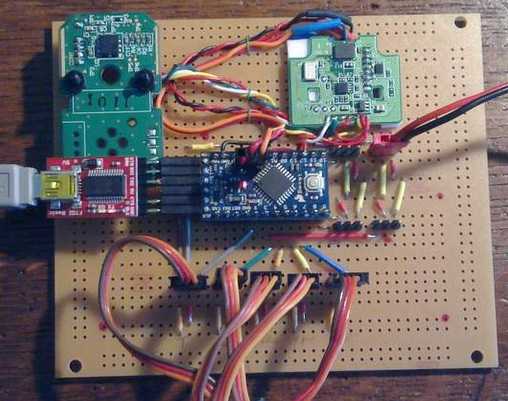
Впрочем, за несколько лет система эволюционировала, и последние платы (они продаются и сейчас, цена вопроса 20-30$) выглядят где-то так:
(фото с сайта Hobbyking.com)
Последние версии MultiWii имеют вполне неплохие датчики, умеют зависать в точке по GPS, удерживать высоту и возвращаться домой. Т.к. Multiwii был написан для Arduino, все платы так и остались Arduino-совместимыми, исходный код можно скачать на Github. Одним из недостатков MultiWii является слабый процессор, что ограничивает вычислительные возможности алгоритмов, позже стали появляться клоны на STM32, однако погоды они не сделали, т.к. в плане «железа» любой квадрокоптер достаточно прост, 95% сложности заключается именно в коде. В то же время, я уверен что именно исходники MultiWii стали основой всех сегодняшних коммерческих систем.
ArduCopter
Еще одна система, основанная на Arduino, пошла дальше всех. Сейчас это система с возможностью программируемого полета по точкам, поддержкой радиомодемов и передачи телеметрии, хранения различных логов и пр.
Их софт выглядит примерно так: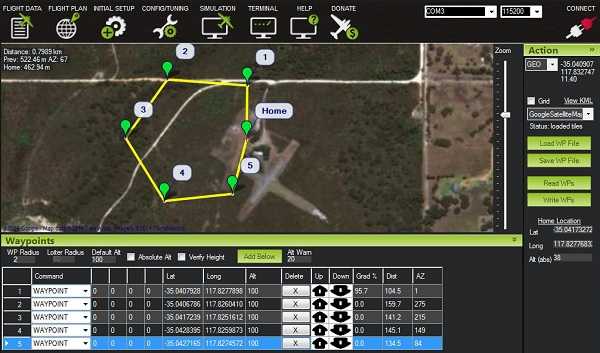
Платы эволюционировали от таких:
до таких
Платы продаются и сейчас, цена вопроса от 50$ (за клоны) до 250$ за оригинальные версии. Исходные коды Ardupilot так же полностью доступны на github, и судя по количеству коммитов, проект активно развивается. Эта система по возможностям не уступает профессиональным аппаратам, качество полета можно посмотреть на видео:
Здесь все классно, за исключением одного «но» — это Open Source, со всеми вытекающими последствиями. Система открытая, дорабатывается энтузиастами, и никто ничего не гарантирует, в том числе и отсутствия багов в софте. Если квадрокоптер упадет на чей-то BMW, жаловаться будет некому.
Бесколлекторные подвесы (brushless gimbal)
Параллельно с квадрокоптерами, развивалась еще одна очень интересная технология — бесколлекторный подвес для фото/видео камеры. Это отдельная плата со своими датчиками, которая удерживает камеру в нужном положении за счет двух моторов, компенсируя развороты по соответствующим осям. Их разрабатывал наш соотечественник, как работает подвес, можно видеть на видео (2013й год).
Видно что коптер качается, а ось камеры нет.
Сейчас этим уже никого не удивить, а тогда это был настоящий прорыв в качестве видеосъемки.
Коммерческие системы
Про них писать не так интересно, т.к. принцип здесь простой, «заплати и лети». Первым был вышеупомянутый MicroKopter, следующей (и не очень удачной) попыткой был XAircraft, в бюджетном секторе были популярны аппараты марки Gaui (это был первый бюджетный аппарат ценой около 400$ за готовый коптер). И наконец, самой успешной компанией является DJI, про которую не писал только ленивый, так что повторяться здесь смысла нет. Они вышли на рынок с контроллерами DJI Naza (ценой 200-400$, с возможностью удержания позиции, возврата домой), была отдельная профессиональная серия DJI Wookong (ценой около 1000$ и большей стабильностью полета). Наконец, DJI вышла на рынок устройств готовых к полету (RTF, Ready To Fly), ну про них уже все знают.
И последние видео.
Первый бюджетный квадрокоптер Gaui 330. Цена вопроса 400$, 2010 год, никаких доп.функций.
Dji Naza v2, цена вопроса те же 400$, возможность удержания позиции, возврата домой, полета любой стороной к пилоту (режим carefree).
Dji Phantom 3 — со встроенным подвесом камеры, управлением со смартфона и прочими плюшками.
На этом пока все, sorry за большое количество видео, но без них никак, иначе было бы неинтересно. Посмотрим что будет дальше, лет через 5…
Автор: DmitrySpb79
Источник
www.pvsm.ru
Первый квадрокоптер | STENA.ee
Сейчас любой взрослый, ответственный и зарабатывающий деньги мужчина может позволить себе купить квадрокоптер, чтобы с его помощью пугать коллег по работе в офисе или на улице.
А первым действующим прототипом такой игрушки (и заодно всех ныне существующих вертолетов) был вертолет русского изобретателя Ботезата, поднявшийся в воздух в далеком 1922 году. Более того, в рамках одного из экспериментальных полетов этот аппарат смог поднять на высоту в 4 метра груз весом 450 кг.
Ниже подробности и видео с испытаний…
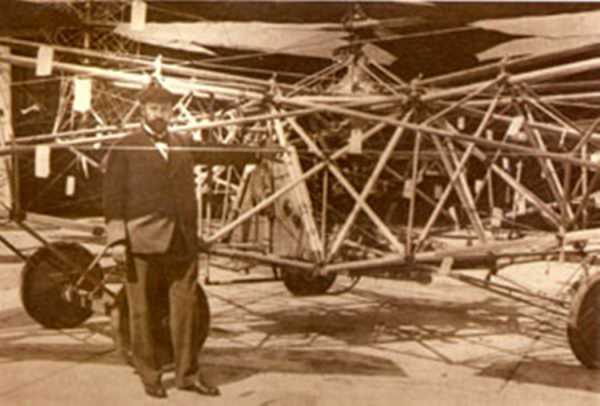
Георгий Александрович Ботезат был американцем российского происхождения, изобретателем, профессором Петроградского технологического института. Также он окончил два института, в Харькове и Бельже (Бельгия), был инженером-электриком. Но главное, почему его помнят, это вертолет.
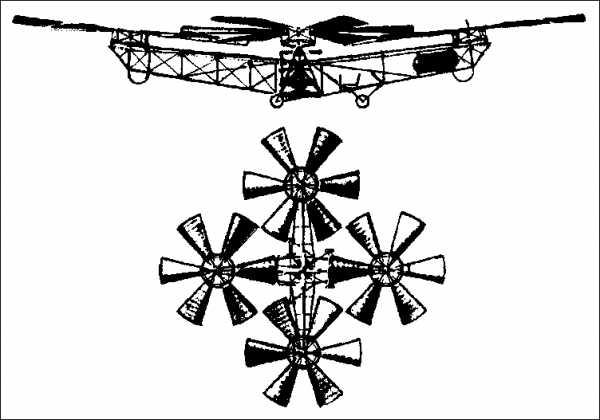
Испытания одного из первых вертолетов, оснащенного четырьмя винтами, начались в 1922 году. Многовинтовая схема позволяла упростить управление аппаратом: поворот осуществлялся изменением положения носовой части вертолета. Каждый винт изменяемого шага состоял из шести лопастей. В конструкции использовались растяжки из струн… от рояля.
Разработка квадрокоптера велась на деньги армии США. Цель — создать летательный аппарат с вертикальными взлетом и посадкой. У Ботезата не было терпения на разработку прототипов, так что он сразу принялся строить полноразмерный аппарат.
Несмотря на потраченные на программу 200 000 долларов, что было большой суммой в первой половине прошлого века, проект был прикрыт из-за некоторых проблем. В частности, чтобы просто лететь вперед, был нужен попутный ветер. Ботезат хотел продолжить работу и исправить эту проблемой, но не успел.
Изобретатель рядом с летательным аппаратом.
Ручка управления, хранится в Смитсоновском музее авиации и космонавтики.

Технические характеристики
Управление: 1 пилот
Грузоподъемность: до четырех пассажиров
Габариты длина/ширина/высота: 20 х 20 х 3 метра
Масса: 1633 кг
Двигатель: 1 роторный двигатель Le Rhone мощностью 180 лошадиных сил
Максимальная скорость: 48 км/ч
Рабочая высота: 5 м
Максимальная высота: 9,1 м
Рекомендуется к просмотру:
www.stena.ee
История квадрокоптера — КиберМАКС мужской информационно-развлекательный портал!
Квадрокоптер — другие варианты названий мультикоптер, беспелотник, беспилотный дрон, часто оснащенный видеокамерой, который взлетает с помощью четырех винтов. Квадрокоптер классифицируются как вертолет, в отличие от самолетов из-за вертикально ориентированных винтов и вертикального взлета. В отличие от большинства вертолетов, квадрокоптер использует две пары одинаковых односкатных винтов; два по часовой стрелке (CW) и два против часовой стрелки (CCW). Они используют изменение оборотов для управления полетом. Контроль движения достигается за счет изменения скорости вращения одного или нескольких дисков ротора, тем самым изменяя его крутящий момент, нагрузку и тягу / подъемные характеристики.

В начале своей истории, quadcopter (тогда называли quadrotor) создавался как пилотируемое транспарантное средство, эксперименты проводились на протяжении всех 1920 и 1930 годов. Ранние квадрокоптеры были одними из первых успешных аппаратов, на которых был произведен вертикальный взлет и посадка. Однако ранние, пилотируемые квадрокоптеры еще на заре существования не прижились в авиации, из-за плохой стабилизации и управления.

Совсем недавно квадрокоптеры (мультикоптеры) стали очень популярны в качестве беспилотных летательных аппаратов. Эти транспортные средства используют электронную систему управления и электронные датчики для стабилизации аппарата. Благодаря небольшому размеру, гибкости и маневренности квадрокоптер может быть поднят в воздух как в помещении, так и на открытом воздухе.

Есть несколько преимуществ у квадрокоптера перед вертолетами.
- Во-первых, квадрокоптер не требует дополнительных механических соединений для изменения угла наклона лопасти ротора, как у вертолета. Это упрощает саму конструкцию и обслуживание транспортного средства.
- Во-вторых, использование четырех роторов позволяет каждому отдельному ротору иметь меньший диаметр, в отличии от огромного винта вертолета, что позволяет квадрокоптеру обладать меньшей кенитической энергией во время полета. Это снижает износ роторов. Для малых беспилотных летательных аппаратов, это делает их более безопасными для тесного взаимодействия.
- Вокруг лопастей винтов некоторых квадрокоптеров установлены защитные кожухи, которые позволяют защитить лопасти и окружающее их пространство от повреждения при случайном взаимодействии.Из-за простоты конструкции и управления, квадрокоптер часто используется в качестве любительского проекта авиамоделистов.
kibermax.info