|








korabley.net
Надводно-подводный корабль — Циклопедия
Надводно-подводный корабль[1] или Semisubmerged ship[2] (другие названия полупогружаемый корабль[3][4], полуподводная лодка[5], корабль-подлодка[6], ныряющий корабль[7]) — совмещение в рамках одного корабля достоинств надводного корабля (высокой скорости, огневой мощи) и подводной лодки (скрытности, способности атаковать цели из подводного положения). Попытки создания подобных гибридов периодически предпринимались с конца 19 века и по настоящее время во многих странах мира, но ни одно из них не увенчалось значительным успехом
Создание таких кораблей натолкнулось на ряд технический проблем в силу разных требований к надводному кораблю и подводной лодки. Например по форме корпуса оптимальные для надводного хода очертания кораблей имели плохую обтекаемость в подводном положении, а идеальный для надводного корабля корпус имел избыточную плавучесть для подлодки (что приводило к медленному погружению). Также гибридные корабли оказались хуже приспособлены к надводному бою по сравнению с обычными надводными кораблями, например не могли иметь бронирования (иначе для погружения и движения в подводном положении потребовались бы балластные цистерны неприемлемых размеров) и в целом хуже переносили попадание снарядов и ракет в корпус (например пробитие балластных цистерн лишало корабль возможности погружения). Попытка совместить в одном корабле полноценную подлодку с полноценным боевым кораблем приводила к гигантским размерам гибридов (недаром гибриды типа HMS X1 и подлодки Сюркуф долгое время держали первенство по размеру среди подлодок), что ухудшало скорость, управляемость и маневренность при одновременном повышении уязвимости в силу большей площади поражения. В целом можно сказать, что попытка совмещения в рамках одного корабля тактики подлодки (скрытность и способность атаковать из подводного положения) и надводного корабля (высокая надводная скорость и большая огневая мощь) привела к появления плохой подлодки в сочетании с плохим надводным кораблем, которая уступала по своим параметрам и возможностям специализированным кораблям.
Существуют многочисленные совместные описания ныряющих кораблей в СМИ и специализированной литературе, но обобщающие подробные источники, описывающие подобный класс кораблей, не известны. Если отличить гибрид от обычного надводного корабля не составляет сложности, то выделение гибридов из общего класса чистых подлодок имеет определенные затруднения. Отличием гибрида от чистой подлодки является попытка приспособить его именно к надводному бою (например артиллерийские орудия стояли на многих подлодках, но они были предназначены на крайние случаи или обстрелы невооруженных торговых судов, но не для артиллерийской дуэли с надводными кораблями противника). Впрочем до 1944 года все подлодки были погружающимися лодками — надводными кораблями, способными погружаться под воду
[править] Классификация гибридов
По степени погружения надводно-подводные гибриды можно разделить на 2 типа: ныряющие корабли (способные полностью погружаться и перемещаться под водой, но уступающие по глубине погружения и скорости подводного хода чистым подлодкам) и полупогруженные субмарины (способные погружать под воду большую часть своего корпуса, но не теряющие связь с поверхностью воды и способные двигаться в таком полупогруженном положении). Впрочем некоторые гибриды могут идти как в полупогруженном, так и в полностью подводном положении, поэтому данная классификация довольно условна. По совмещаемым в рамках одного корабля свойствам гибриды можно поделить на 2 концепции: «скорость надводного корабля+скрытность подводной лодки» (английские эскадренные подлодки серии К и советские подлодки типа Правда) и «огневая мощь надводного корабля+скрытность подводной лодки» (подводные мониторы серии М, подводные крейсеры и прочее).
Одним из направлений надводно-подводного гибрида стало создание полупогруженных кораблей, действующих на границе воздуха и воды между традиционными сфера действия надводных кораблей и подводных лодок. Преимуществами полупогруженного подтипа надводно-подводных кораблей является трудность их обнаружения ввиду низкой высоты надводной части над поверхностью воды и возможность использования оружия надводного корабля в сочетании со скрытностью подводной лодки
[править] Военные гибриды
[править] Низкосидящие корабли
Предшественниками гибридных кораблей (точнее полупогруженных полуподлодок) с определенными оговорками можно назвать низкосидящие корабли водоизмещающего типа с малой высотой надводного борта (например, первый в истории броненосец «Монитор» имел осадку 3,2 метра и высоту борта 0,6 метра)[11]. Монитор кардинально отличался от традиционных кораблей: вместо размещения пушек на бортах все артиллерийские орудия были сконцентрированы в бронированной башне на палубе. При этом почти весь остальной корпус находился под водой, что давало внешнее сходство с полупогруженными полуподлодками. Броненосцы типа Монитор сравнивали со слоном, переходящим реку под водой и высунувшим хобот для дыхания или с кораблем, ныряющим и прорезающим волны.
Однако эффективные на прибрежном мелководье и реках низкосидящие мониторы в условиях открытых океанов и морей имели плохую мореходность: при сильном волнении (не говоря уже о штормах) волны захлестывали вентиляционные окна и орудийные амбазуры, постепенно наполняя мониторы изнутри водой и как следствие топили их. Поэтому популярные в США броненосцы типа Монитор не получили развития у морских держав океанического флота (например у Британии).
[править] Полупогружные полуподлодки
→ Полуподводные лодки
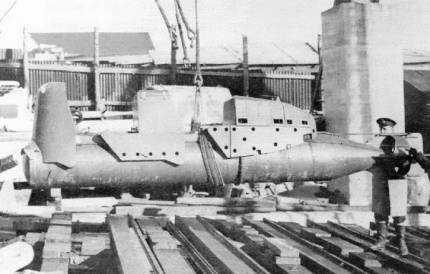
Развитие идеи гибридного надводно-подводного корабля начиналась с полупогружных полуподлодок рубежа 19 и 20 века[10]. Полуподводные лодки — промежуточные между надводными кораблями и подводными лодками суда, большая часть корпуса которых находится под водой. Характерны для самого раннего этапа развития подводных лодок. Причиной их появления послужила невозможность создания на тот момент полностью погружающихся боевых кораблей и отсутствие надежных двигателей для быстрого хода в подводном положении. Примеры полуподводных лодок: водобронный миноносец С. К. Джевецкого, полуподводная лодка С. А. Яновича, полуподводная лодка С. А. Боткина и подводный миноносец Е. В. Колбасьева. Преимуществом данного типа подлодок является возможность установки характерного для надводного корабля того времени паровой котла с турбинами или паровыми машинами. У полупогружных подлодок над поверхностью воды возвышаются только надстройки и часть рубки, что затрудняет поражение вражеским огнем и уменьшает заметность ввиду низкой высоты надводной части.
После появления двигателей внутреннего сгорания для надводного хода и электромоторов для подводного хода идея полуподводных лодок была отвергнута подводных флотом, но гибридные корабли унаследовали от полуподводных лодок идею движения на границе водных и воздушных сред в полупогруженном-полувсплытом состоянии. Движение в полупогружном состоянии характерна например для таких надводно-подводных гибридов как подводный крейсер Сюркуф и ныряющий катер проекта 1231.
[править] Эскадренные подводные лодки
Важнейшим преимуществом подлодок по сравнению с надводными кораблями является повышенная скрытность благодаря перемещению под водой. Однако выигрывая в скрытности, подлодки уступают надводным кораблям в скорости хода: при движении в подводном положении сопротивление воды увеличивается. При движении же в надводном положении оптимизированный для подводного хода корпус подлодок проигрывал надводным кораблям. Поэтому появилась идея придать подлодкам равную с надводными кораблями скорость надводного хода, не теряя при этом способности погружаться и атаковать под водой. Эта идея получила две формы воплощения: достижение высокой скорости надводного хода за счет использования паротурбинных установок (английские подлодки серии «К») или придание корпусу подлодки очертаний надводных кораблей (подлодки типа «Правда»).
Данное направление гибридизации даже привело к созданию отдельного класса эскадренных подлодок. Их отличительной особенностью являлась повышенная до 25 узлов (для сравнения дизельные субмарины имели надводную скорость в 14-18 узлов) скорость надводного хода, сопоставимая со скоростью чисто надводных кораблей типа линкоров и крейсеров. Предполагалось, что благодаря этой особенности эскадренные подлодки смогут передвигаться к цели в составе эскадр надводных кораблей, а лишь затем погружаться и атаковывать цели на манер подлодок. Яркими представителями эскадренных подлодок стали в Англии паротурбинные подлодки серии К, а в СССР подлодки типа Правда.
Имеющие небольшую глубину погружения, высокую скорость надводного хода и сильное артиллерийское вооружение подлодки «Правда» были по сути ныряющими надводными кораблями. Однако соединить в одном корпусе преимущества надводного корабля и подводной лодки не удалось: у эсминцев и подлодок разное оптимальное соотношение длины к ширине и ширины к осадке (например высокий борт и узкий корпус эсминца в подводном положении имеет плохую обтекаемость). Для максимального хода в надводном положении выбрали корпус с минимальной осадкой, что имело следствием большую для подлодки плавучесть в 92 %. Эффективный для надводного хода корпус «Правды» из-за избыточной плавучести долго погружался, а в подводном положении плохо управлялся. Другими словами для достижения равной с эсминцами скорости надводного хода пришлось пойти на сильное ухудшение подводных свойств «Правды».
Опыт английских паротурбинных подлодок серии К (использующих паровые трубы для хода в надводном положении и электромоторы для подводного хода) оказался еще более неудачным. Низко сидящие подлодки в условиях ночной темноты или штормовой погоды с трудом замечали рулевые надводных кораблей, поэтому попытки их использования в составе эскадр надводных кораблей привели к многочисленным столкновениям. Зачастую подлодки серии К заполнялись водой через плохо задраенные дымовые трубы.
[править] Артиллерийские подводные лодки
Еще одним направлением развития идеи гибридных кораблей стала попытка соединения огневой мощи надводных кораблей и скрытности подводных лодок. Для этой цели на подводные лодки стали активно ставить артиллерию. Причиной подобного решения послужило низкое качество ранних типов торпед, а также инерционная привычка полагаться на проверенные на практике пушки. До 1950-х годов на большинстве подводных лодок стояли пушки, что даже послужило причиной выделения особого подкласса торпедно-артиллерийских подлодок. Артиллерийские подводные лодки включали в себя два основных класса: подводные крейсеры и подводные мониторы.
В 1920-х годах «оружием будущего» считались дирижабли и подводные лодкиНаучно-технический прогресс в годы Первой Мировой войны породил несколько странных проектов в военном кораблестроении[12]. Военно-техническая мысль того времени склонялась к мнению, что весь флот будущего будет иметь свойства подлодок[12]. Самыми многообещающими казались проекты подводных крейсеров[12]. В годы Первой мировой войны немцы спустили на воду подводный крейсер U-139 с шестью 500-мм торпедными аппаратами (боекомплект 19 торпед) и двумя 150-мм орудия, в 1920—1921 годах в Великобритании создали подводные мониторы серии М с одной пушкой калибра 305 мм, в 1925 году в Англии построили подлодку HMS X1 с шестью 533-мм торпедными аппаратами и четырьмя 132-мм пушками[13], а во Франции в 1929 году — подлодку Сюркуф с двумя пушками калибра 203 мм, четырнадцатью торпедными аппаратами (32 запасные торпеды) и одним гидросамолетом, который стал вершиной попыток соединить в рамках одного корабля огневую мощь надводных кораблей и скрытность подводных лодок.
[править] Ныряющие корабли с ракетным вооружением
Следующим этапом развития идеи надводно-подводного корабля стали различные проекты ныряющих кораблей с ракетным вооружением. Данный этап характеризуется постепенным отказом от корабельной артиллерии и переход всех типов боевых кораблей на ракетное вооружение. Такая унификация сблизила надводные и подводные корабли. Примерами данного типа гибридных кораблей являются Проект 1231 опытного малого погружающегося ракетного корабля и фрегат SMX-25[14].
[править] Ныряющие и полупогружаемые лодки КНДР
→ Полупогружные суда КНДР
Предназначенные для транспортировки диверсантов или легких торпед ныряющие катера КНДР имеют герметичную закрытую рубку обтекаемой формы, малую высоту надводной части (благодаря чему не засекаются радарами), способны полностью погружаться и передвигаться под водой. Ныряющие катера КНД имели несколько модификаций (тип А, тип B Racoon, тип С SP-10, тип I-SILC, I-SILC-Viet с Taedong-B и Taedong-C) и прошли путь от частично погружающихся на уровень палубы катеров до полноценных подлодок с полным погружением и передвижением под водой. Ныряющие лодки КНДР могут нести от 2 до 4 пассажиров или легкие торпеды калибра 324 мм. На боевой счету полупогружаемых кораблей КНДР утопление торпедой южнокорейского корвета «Чхонан»[15]. Самые современные модификации ныряющих лодок Kajami (Taedong-B) и Gahjae (Taedong-C) даже закупает Иран для своих диверсионных подразделений[16].
[править] Десантные катера Запада
Ныряющий катер SDV в надводном положении и в полупогруженном состоянии Надводно-полупогруженно-подводный катер MRCC в надводном и подводном положенииПовышенная скрытность надводно-подводных кораблей привлекла внимание десантных сил специального назначения. Американский полуглиссирующий катер Sealion «Морской лев» длиной 21 метр и надводной скоростью скоростью более 40 узлов обладает способностью переходить в полупогруженное положение (при этом над уровнем воды в целях наблюдения остается часть рубки-надстройки высотой в 10—20 сантиметров). Погружение происходит по типу подводной лодки за счет наполнения балластных цистерн водой. В полупогруженном положении скорость катера резко падает, но зато повышается скрытность. Поэтому для Sealion придумана следующая тактика: скоростное прибытие к месту боевых действий в надводном положении, а затем подкрадывание к цели на малой скорости в полупогруженном состоянии. Катер выполнен по стелс-технологиям, обеспечивающим максимальную незаметность. По форме Sealion напоминает кинжал типа стилета: узкий длинный корпус заканчивается носом в виде заостренного четырехгранника, а низкая надстройка переходит в скошенную корму. На корме находится люк для десантирования 8 солдат на 2 моторных лодках жестконадувного типа. Помимо Sealion способность идти в полупогруженном положении имеют американский надводно-полупогруженно-подводный катер MRCC и шведский ныряющий катер SDV. Подобные Sealion катера находятся на вооружении сил специального назначения Сингапура[17].
[править] Катера спецназначения России
Российская компания «Корд» разрабатывает погружаемые катера, предназначенные для спецопераций. Они носят название DCE Seak Carrier 8 и DCE Seak Carrier 8. Первый, при длине и высоте 10.45 и 2,65 м (масса 3800 кг, полезная нагрузка 1200 кг), способен передвигаться в надводном (подводном) положении со скоростью до 30 (4-5) узлов на глубину до 50 м.
[править] Прочие гибриды
[править] Полупогружные лодки наркоторговцев
Ныряющие катера применяются колумбийскими наркоторговцами для транспортировки наркотиков в США. Параметры ныряющих катеров наркоторговцев: длина — до 25 метров, высота над уровнем воды — до 45 сантиметров, грузоподъемность — до 10 тонн кокаина. Официальное наименование катеров наркоторговцев у силовых структур США — Self-Propelled Semi-Submersibles (SPSS) (самоходные полупогружные лодки). Главным преимуществом такого катера для наркоторговцев является трудность его обнаружения по сравнению с обычными кораблями: при визуальном наблюдении лодка видна только при нахождении вплотную к ней (и то при условии хорошей видимости и отсутствии на поверхности воды пенных волн), также из-за низкой высоты над уровнем воды и специальным материалам ее не засекают РЛС.
Рентабельность от использования нарко-субмарин составляет 1000 % за один рейс: при стоимости постройки в 100 млм. долларов каждая субмарина может брать на борт груз героина рыночной стоимостью в 1 млрд долларов. Нарко-субмарины являются кораблями одноразового использования: в конце рейса она затапливаются у берегов США для сокрытия факта нелегального провоза наркотиков.
В последнее время наркобароны перешли к строительству настоящих подлодок, способных полностью погружаться и перемещаться под водой. Таким образом полупогружные лодки наркоторговцев оказались промежуточным этапом между обычными лодками и чистыми подлодками.
[править] Ныряющие корабли гражданского назначения
Помимо военного аспекта существовало несколько проектов надводно-подводных кораблей гражданского назначения. Государственное малое предприятие «Дельфин» (Санкт-Петербург) сконструировало надводно-подводный катер, предназначенный для транспортировки в области континентального шельфа группы водолазов численностью до 6 человек со снаряжением, оборудованием и инструментами для досмотровых и ремонтных работ. Катер способен погружаться под воду на глубину до 15 метров. Корпус катера оптимизирован для достижения высокой скорости надводного хода (32 узла), а в подводном положении развивает скорость в 2-3 узла при допустимом уровне управляемости. Параметры катера: длина — 6,6 м, ширина — 2,2 м, высота — 1,3 м, осадка — 0,6 м, водоизмещение в надводном положении — 4 т., а в подводном — 4,4 т., дальность плавания в надводном режиме — 100 миль, а в подводном — 4-5 миль, мореходность — 4 балла. В надводном положении использовались водометы, приводимых в движение двумя роторно-поршневыми двигателями мощностью 2*110 кВт. В подводном положении в дело вступали 2 винторулевые колонки в носовой части катера. Санкт-петербургское морское бюро машиностроение «Малахит» разработало проект ныряющей яхты. Глубина погружения — 50-100 м, длина — 30 м, ширина — 5 м, осадка — 4,8 м, водоизмещение — около 300 т., скорость надводного хода — 8 уз., а подводного — 3 уз., экипаж — 4 чел. Ныряющая яхта способна брать на свой борт до 6 пассажиров в 3 каютах, оснащенных подводными иллюминаторам 800*800 мм. Конструкция яхты предполагает возможность ее переоборудования в экскурсионное (на 40 чел.) или научно-исследовательское судно[18].
[править] Перспективы гибридов
Несмотря на более чем век и многочисленные попытки разработок перспективы надводно-подводных кораблей остаются неясными из-за повышенной сложности (стоимости) и меньшей боевой эффективности по сравнению с обычными надводными кораблями и подводными лодками. В настоящее время концепция гибрида получила практическое воплощение только в сфере десантных и диверсионных катеров (КНДР, Иран и США) и ныряющих катерах наркоторговцев. Единственным выявленным преимуществом гибрида по сравнению с обычным надводным кораблем оказалась повышенная скрытность.
[править] Влияние гибридных кораблей на литературу и искусство
Необычные проекты подводных крейсеров с артиллерийским вооружением (британские подлодки класса М(англ.)русск., британская подлодка HMS X1(англ.)русск., немецкие подлодки класса U 139(англ.)русск. и французской подлодка Сюркуф), а также паротурбинные британские подлодки класса К(англ.)русск. даже послужили прототипами оружия одного из жанров фантастики дизельпанка.
cyclowiki.org
Подводные лодки России и мира фото, видео смотреть онлайн

Подводные лодки проекта 955 (09551), 955A (09552) «Борей» (по кодификации НАТО SSBN «Borei», также «Dolgorukiy» — от имени головного корабля класса) — серия российских атомных подводных лодок класса «ракетный подводный крейсер стратегического назначения» (РПКСН) четвёртого поколения.
Подробнее…
Подборка фото АПЛ РФ различных проектов Северного и Тихоокеанских флотов в различных погодных условиях
Подробнее…
Тяжёлые ракетные подводные крейсеры стратегического назначения проекта 941 «Акула» (SSBN «Typhoon» по кодификации НАТО) — серия советских и российских подводных лодок, самые большие в мире атомные подводные лодки (и подводные лодки вообще).
Подробнее…
Дизель-электрическая» подводная лодка проекта 877, или «Варшавянка, более известная на Западе как лодка типа «Кило», была разработана в начале 1970-х гг. для обеспечения противокорабельной и противолодочной обороны советских военно-морских баз, береговых объектов и защиты морских коммуникаций, а также для несения дозорной службы и ведения разведки. Эти лодки средней дальности плавания сначала строились в Комсомольске-на-Амуре на Дальнем Востоке, а за тем в Нижнем Новгороде и на Адмиралтейской верфи в Ленинграде (ныне г. Санкт-Петербург). Первая лодка была заложена в 1979 г. и сдана флоту в 1982 г.
Подробнее…
АПЛ пр. 971 (шифр «Барс») разработана в СПМБМ «Малахит» под руководством Г.Н. Чернышова. Относится к ПЛА третьего поколения и является в полном смысле этого слова многоцелевой. Она предназначена для поиска, обнаружения и слежения за ПЛАРБ и АУГ противника, их уничтожения с началом боевых действий, а также нанесения ударов по береговым объектам. При необходимости лодка может нести мины.
Подробнее…
Подводные лодки проекта 677 (шифр «Лада») — серия российских дизель-электрических подводных лодок, разработанных в конце XX века в ЦКБ «Рубин». Предназначаются для выполнения разведывательных и диверсионных мероприятий против надводных кораблей и подлодок противника, защиты прибрежных районов от вражеских десантов, а также для постановки минных заграждений и прочих подобных задач.
Подробнее…
Малые подводные лодки проекта 865 «Пиранья» — проект подводных лодок ВМФ СССР и Российской Федерации. Тип состоял на вооружении флота с 1990 по 1999 года. Всего было построено 2 подводные лодки данного проекта: МС-520 и МС-521. Дальнейшее строительство подобных лодок в СССР было приостановлено. В результате серия ограничилась опытной МС-520 и головной МС-521, сданной флоту в декабре 1990 года.
Подробнее…
Первая подводная лодка промежуточного проекта 641Б «Сом», предназначавшегося для замены лодок большой дальности плавания проекта 641 в операционных зонах Черноморского и Северного флотов, была собрана в 1972 г. в г. Горьком. Всего было по строено 18 единиц двух модификации, имевших незначительные отличия. Лодки поздней постройки были на несколько метров длиннее, возможно, в связи с установкой оборудования ракетных комплексов ПЛО. Носовое гидроакустическое оборудование внешне было аналогичным тому, которое устанавливалось в то время на современных советских атомных ударных подводных лодках, а силовая установка была испытана на последнем подтипе «Фокстротов».
Подробнее…
После вступления в строй лодка входила в состав 13-й ДиПЛ 3-й ФлПЛ СФ, а с сентября 2000 г. — в состав 31-й ДиПЛ 12-й ЭскПЛ СФ. Корабль до момента постановки в средний ремонт (в августе 2004 г.) предпринял двенадцать автономных походов на боевую службу, 26 раз нес боевое дежурство в пунктах базирования и выполнил четырнадцать практических пусков ракет Р-29РМ. В июле-августе 1994 г. К-18 под командованием капитана 1-го ранга Ю.И. Юрченко (старший на борту контр-адмирал А.А. Берзин) в охранении АПЛ Б-414 (пр. 671РТМК) предприняла поход в воды Арктики с всплытием в районе Северного полюса.
Подробнее…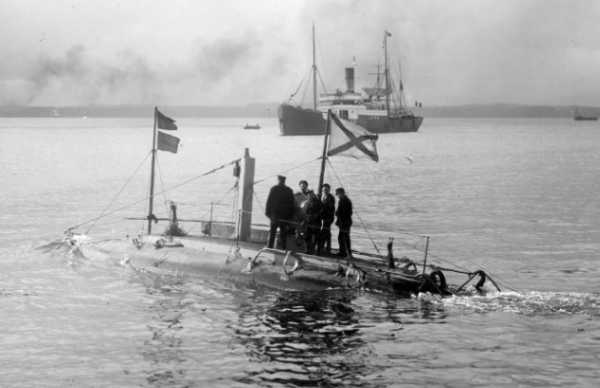
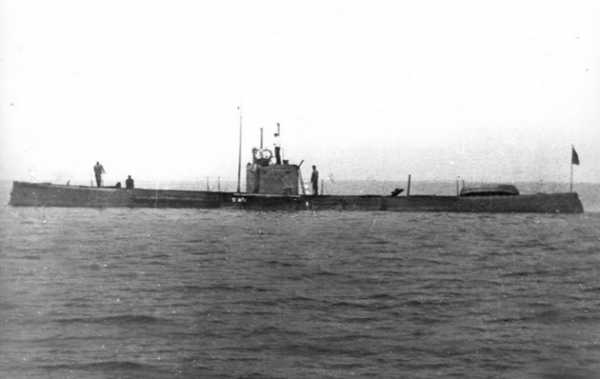
Подводная лодка «Дельфин» до модернизации
«Дельфин» — первая боевая подводная лодка русского флота, послужившая прототипом для последующего развития отечественных кораблей данного класса вплоть до 1917 г. Проект был разработан специальной комиссией в составе И.Г. Бубнова, М.Н. Беклемишева и И.С. Горюнова. Главные балластные цистерны размещались в легких оконечностях и вентилировались внутрь ПК.
Подробнее…
Строительство в 1958 г. первых советских подводных лодок проект 633 (по классификации NATO тип «Ромео») в г. Горьком, как усовершенствованных лодок проекта 613 совпало с успешным внедрением ядерных энергетических установок в ВМФ СССР. В результате только 20 дизель электрических подводных лодок этого проекта из 560 первоначально планировавшихся были действительно построены.
Подробнее…
Цветной фильм про немецкие подводные лодки второй мировой войны, которые торпедируют корабли союзников, в основном американские. Видео очень качественное и в цвете, что редкость для того времени.
Подводная лодка «Фельдмаршал Граф Шереметьев» тип «Касатка»
Удачные испытания подводной лодки «Дельфин» доказали готовность отечественной промышленности к самостоятельной постройке подводных лодок. И.Г. Бубнов обратился в Морское министерство за разрешением приступить к разработке «подводного миноносца № 140». 1 сентября 1903 г. управляющий Морским Министерством разрешил разработку чертежей подводной лодки, 20 декабря 1903г.
Подробнее…
Лейтенант С.А.Янович, работая над проектом подлодки изобретателя Колбасьева, разработал интересное решение полупогружающейся лодки малой видимости. В его распоряжение выделили корпус старой лодки Джевецкого (1880 года), который переделали, увеличив в размерах и установив автомобильный двигатель. Корпус удлинили с 5 до 7,5 м и усилили двойными стенками. Образовавшееся междубортное пространство использовали в качестве топливных и балластных цистерн.
Подробнее…
12 сентября 1903 г. Правление Невского судостроительного и механического заводов в Санкт-Петербурге подписало с американской фирмой «Holland Torpedo Boat», принадлежащей Дж. Голланду, договор о праве Невского завода в течение 25 лет осуществлять постройку ПЛ по проектам Голланда в России.
Подробнее…
Подводная лодка «Форель» построена в 1902-1903 гг. на верфи Ф.Круппа в Киле по собственной инициативе в качестве «живой» рекламы для привлечения внимания германского правительства к подводным лодкам, как новому средству борьбы на море. Строилась по проекту испанского инженера Р. Эквилея.
Подробнее…
Подводная лодка «Палтус» типа «Осетр»
Начавшаяся 26 января 1904 г. русско-японская война и последовавшие за этим потери русской эскадры потребовали от правительства России срочного усиления флота. Наряду с развитием строительства отечественных подводных лодок были приняты меры по приобретению подводных лодок иностранных фирм.
Подробнее…
24 мая 1904 г. с фирмой Ф. Круппа был подписан контракт на постройку 3-х подводных лодок типа «Е» ПЛ «Карп», ПЛ Камбала, ПЛ «Карась». Эти подводные лодки строились под заводскими номерами 109, 110, 111. Учитывая новизну конструкции, в контракте не предусматривались санкции за невыполнение условий договора. Испытания первой подводной лодки должны были начаться 10 января 1905 г., второй и третьей — в феврале и марте того же года.
Подробнее…
Водолазы в Крыму на глубине в семьдесят метров производят осмотр затонувшей подводной лодки первой мировой войны. Из исторической хроники известно, что четырнадцать подводников достали, а о шести ничего не известно.
oruzhie.info
Ныряющий фрегат » Военное обозрение
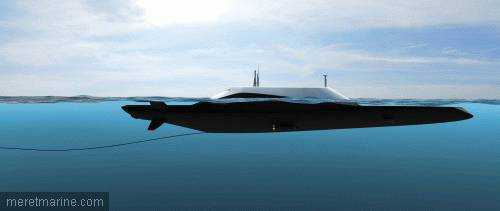
 Военные французские разработчики ошарашили мир новым военным кораблем. Революционное оружие представляет собой «погружаемый фрегат» или, как называют его сами конструкторы, «надводную подлодку».
Военные французские разработчики ошарашили мир новым военным кораблем. Революционное оружие представляет собой «погружаемый фрегат» или, как называют его сами конструкторы, «надводную подлодку».На открывшемся 25 октября в парижском пригороде Ле-Бурже европейском военно-морском салоне EURONAVALE-2010 представлено немало проектов перспективных боевых кораблей ближайшего будущего. Специалисты четко выделяют две тенденции: создание кораблей противоракетной обороны и кораблей, специально спроектированных под базирование беспилотных летательных аппаратов. Среди них есть как обычные надводные корабли, так и весьма футуристические проекты наподобие «погружаемого фрегата» SSX-25, предложенного французским концерном DCNS.
Сами французы называют необычный корабль «надводной подлодкой»: именно так можно перевести на русский язык французское название Sous-marin de surface. Корабль длиной 109 метров имеет полупогруженный подводный корпус, оптимизированный для высоких ходов в надводном положении. Для этого в удлиненном ножевидном корпусе корабля установлены особо мощные газовые турбины, приводящие в движение три водометных движителя, при этом «надводная подлодка» сможет пройти 38-узловым ходом не менее 2000 морских миль.
Турбины и дизели подводного хода расположены на едином основании в массивной палубной надстройке. По прибытии в район боевых действий корабль совершает «нырок», частично превращаясь в субмарину.
При этом воздухозаборники турбин и выхлопные устройства закрываются специальными заслонками, из надстройки выдвигаются «шнорхели» (устройства подводного питания дизелей воздухом), из центральной части корабля – азиподы, а в носу – рули глубины. В погруженном состоянии водоизмещение корабля составляет 4800 тонн, он способен передвигаться со скоростью до 10 узлов.
Для наблюдения за поверхностью при этом может использоваться специальная выдвижная мачта наподобие перископа, снабженная радаром и разного рода оптическими датчиками.

Компания не сообщает, способен ли корабль действовать в полностью погруженном состоянии, то есть без выдвижных устройств для забора атмосферного воздуха, только на электрическом ходу. Компания подчеркивает, что их ныряющий корабль для борьбы с подводными целями не оптимизирован, тем не менее он имеет для самообороны восемь торпед в носовых торпедных аппаратах.
Основное вооружение корабля – 16 универсальных вертикальных пусковых установок для размещения как крылатых (включая противокорабельные), так и зенитных ракет.
Таким образом, в качестве перспективного корабля французские конструкторы предлагают некий гибрид фрегата УРО (высокая скорость, мореходность, мощный ракетный комплекс) и ударной подводной лодки (скрытность, способность атаковать цели из подводного положения). Погруженный корпус обеспечит гибридному кораблю меньшую уязвимость от качки, сделав его стабильной пусковой платформой, а развитая надстройка позволит частично избавиться от такого недостатка ПЛ, как теснота. Более того, погруженный корпус – это еще и меньшая заметность во всех диапазонах и высокая экономичность за счет меньшего сопротивления ходу на границе сред.
Кроме того, как отмечают специалисты, развитая надстройка позволяет размещать в ней различные достаточно комфортные помещения для спецназа и его специфического оборудования – преимущество, которого лишены ПЛ спецназначения. В надстройке, безусловно, может быть устроен и специальный ангар для БПЛА (беспилотный летательный аппарат), особенно привлекательны в этом плане винтокрылые машины с вертикальным взлетом. Такие вертолеты-роботы можно хранить в автоматизированных стеллажах по сторонам ангара с раздвижной крышей, которая будет открываться для выпуска и приема БПЛА.

Очевидно, что в такой конфигурации корабль следует рассматривать, прежде всего, как разведчик, предназначенный для скрытного и длительного сбора информации в любом прибрежном районе, по тем или иным причинам не доступном для космической или авиационной разведки. Другое возможное назначение подобного корабля – расчистка плацдарма для коммандос, скрытные удары по береговым объектам, расчистка пляжей перед прибытием основных десантных сил. Понятно, что наиболее ценен он будет против противника, не располагающего современными средствами противолодочной борьбы.
Не следует думать, что французы изобрели нечто принципиально новое. Ныряющие и полупогружные субмарины известны с позапрошлого века, некоторые такие корабли даже применялись в бою. Так, английские эскадренные лодки класса К времен Первой мировой, оснащенные (из-за отсутствия мощных дизелей) паротурбинными установками, фактически были ныряющими кораблями и в боестолкновениях действовали из полупогруженного положения, надеясь на защиту корпуса толщей воды. Полупогружным судном вполне можно считать и знаменитый «Монитор»: первый самоходный железный винтовой артиллеристский корабль, примененный северянами во время Гражданской войны в США для обстрела Хемплтонского рейда.
Можно припомнить так же германские мини-субмарины типа «Зеехунде» и «Зеетойфель»: первые являли собой попытку создания некоего морского аналога одноместного самолета-истребителя, а вторые – диверсионного судна с возможностью выхода на берег с помощью гусениц.
Различные проекты ныряющих кораблей создавались и в СССР. Таковыми фактически были ранние советские ПЛ типа «Правда». Для достижения большой надводной скорости конструктор Андрей Асафов постарался придать ПЛ обводы эскадренного миноносца – наиболее быстроходного в то время из надводных кораблей. Но для миноносцев характерно отношение длины к ширине и ширины к осадке абсолютно не свойственное ПЛ. В результате в погруженном состоянии корабль плохо управлялся, а высокий запас плавучести крайне замедлял погружение.
Крайне оригинальным выглядел и проект ныряющего торпедного катера 1231 «Дельфин». Идею подал лично Никита Сергеевич Хрущев. Осматривая как-то на военно-морской базе в Балаклаве быстроходные катера проектов ЦКБ-19 и ЦКБ-5 и наблюдая базировавшиеся там же подводные лодки, он высказал мысль, что с целью обеспечения скрытности действий флота, что особенно важно в условиях атомной войны, надо стремиться «погрузить» флот под воду, и предложил для начала «погрузить» ракетный катер.
В соответствии с ТТЗ корабль проекта 1231 предназначался для нанесения внезапных ракетных ударов по боевым кораблям и транспорту в узких местах, на подходах к военно-морским базам и портам противника, участия в обороне побережья, районов базирования флота и приморских флангов сухопутных войск, в отражении высадки десантов и нарушении морских коммуникаций противника, а также для несения гидроакустического и радиолокационного дозора в местах рассредоточенного базирования флота. Предполагалось, что при решении указанных задач группа подобных кораблей должна была развертываться в заданном районе и длительное время находиться в погруженном положении на позиции ожидания или сближаться с противником также в подводном положении, поддерживая контакт с ним гидроакустическими средствами.
Сблизившись, ракетоносцы всплывали, на большой скорости выходили на рубеж ракетного залпа, выпускали ракеты, затем снова погружались или отрывались от противника с максимальной скоростью в надводном положении. Нахождение ракетоносцев в погруженном положении и большая скорость хода при атаке должны были уменьшить время их нахождения под огневым воздействием противника, в том числе средств воздушного нападения.
Проект довольно успешно развивался с 1959 года до отставки Хрущева в 1964 году, когда был заморожен и позже закрыт

Единственное применение, в котором ныряющие корабли себя оправдали, – это скоростные полупогружаемые десантные катера, используемые, например, северокорейскими диверсантами, а с некоторых пор и их иранскими коллегами. Такого же типа суда, но уже «самодельные» используют и колумбийские наркоторговцы для доставки своего товара в США. Это низкосидящие лодки длиной до 25 метров, надводная часть лодок выступает над поверхностью на высоту не более 45 сантиметров, они могут брать на борт до 10 тонн кокаина. Американские военные и правоохранительные органы называют их самоходными полупогружными лодками, Self-Propelled Semi-Submersibles (SPSS). Обнаружение таких суденышек крайне затруднено даже для столь хорошо оснащенной службы, как американская Береговая охрана.
Видимо, этим и руководствуются и французские конструкторы: какие-нибудь сомалийские пираты большой полупогружной или ныряющий корабль, скорее всего, действительно не заметят. Но вот стоит ли овчинка выделки? Не получится ли так, что корабль такого класса окажется дороже, чем фрегат и подлодка вместе взятые, а по эффективности – хуже, чем каждый по отдельности? Понятно, что в настоящий момент никто не сможет ответить на этот вопрос, но все-таки кажется, что будущее за менее экзотическими кораблями.
topwar.ru
Подводные корабли науки. Дорогами подводных открытий
Подводные корабли науки
Техника и душа — новое в жизни человека и вечное ее начало, новая радость, рожденная их слиянием.
А. Сент-Экзюпери
Научно-исследовательские подводные лодки, отличающиеся от своих военных прародителей формой, конструкцией, возможностями и сферой применения, имеют много общих с ними механизмов и свойств. Поэтому, оценивая технические характеристики, придающие подводному судну качества исследовательского корабля, обратимся сначала к обычной (не атомной) подводной лодке.
В действительности она представляет собой ныряющую лодку, поскольку большую часть времени находится на поверхности моря и способна погружаться только на ограниченный срок. Поэтому при создании подводных лодок приходится учитывать не только условия подводного плавания, но и считаться с требованиями плавания в надводном положении. Ее форма, заимствованная от надводного корабля, обеспечивает ей остойчивость над водой. Лодка снабжена мостиком для визуальной навигации, двумя гребными винтами, двигателями внутреннего сгорания и обычным оборудованием для судовождения и связи. После погружения водоизмещение подводной лодки возрастает, и по условиям работы она становится больше похожей на самолет или дирижабль, чем на надводный корабль. «Оторвавшись» от поверхности моря, она движется в трех измерениях, и ее остойчивость и сохранение заданной глубины требуют постоянного внимания, Всплытие и погружение ее имеют много общего со взлетом и посадкой самолета. Носовые и кормовые горизонтальные рули при изменении глубины играют такую же роль, как рули высоты. И в том и другом случаях механические повреждения могут повлечь за собой последствия более тяжелые, чем при движении по земле или воде.
Работа под водой для нас, привыкших жить, двигаться и общаться в земной атмосфере, требует отрешения от многих навыков и представлений. Различия в химическом составе, плотности, сжимаемости и электропроводности воздуха и воды так велики, что предъявляют совершенно различные требования к устройству и оборудованию самолетов и подводных кораблей. Как только волны сомкнулись над лодкой, она вступает в новый и непривычный мир. Слегка увеличившееся давление на уши свидетельствует, что все отверстия герметически закрыты, и при достаточном удалении от поверхности воды всякое ощущение движения как бы утрачивается.
Плавание лодки напоминает полет самолета в тумане, с той разницей, что обеспечивающие подводный ход гребные электромоторы почти не производят шума. Обычный контакт с внешним миром теряется, и навигация, и маневрирование становятся «слепыми» и выполняются при помощи остроумных приспособлений, специально изобретенных для подводных лодок.
Подводная лодка перемещается в среде, почти в 800 раз более плотной, чем воздух. Давление воды растет с глубиной, и поэтому прочному корпусу лодки придается форма удлиненного эллипсоида, чтобы стальные пластины корпуса, благодаря своей кривизне, могли легче противостоять этому давлению.
При движении лодка с помощью горизонтальных рулей удерживает глубину и, таким образом, находится в состоянии динамического равновесия. Под водой лодка в отличие от надводного корабля не испытывает качки, но ее равновесие неустойчиво — она может удерживаться на глубине и в правильном положении только при определенной весовой нагрузке и строго зафиксированном ее распределении. Положительная плавучесть, необходимая для всплытия, осуществляется с помощью главных балластных цистерн, расположенных снаружи прочного корпуса, между ним и тонкой наружной обшивкой — легким корпусом. Эти цистерны продуваются сжатым воздухом, выгоняющим воду через находящиеся в их нижней части отверстия — кингстоны, а заполняются для погружения посредством открытия клапанов вентиляции вверху цистерн. Так как давление внутри цистерн главного балласта все время равно внешнему, они не требуют конструктивного усиления. Другая, совершенно независимая система уравновешивания подлодки и регулировки ее дифферента[5] состоит из носовой и кормовой дифферентных цистерн и уравнительной цистерны в средней части. Уравнительная служит для поддержания нейтральной (нулевой) плавучести, изменяющейся по мере расходования горючего и других запасов.
Для управления лодкой идеальной была бы нейтральная плавучесть, но соблюсти это требование довольно трудно, так как и объем вытесняемой лодкой воды и ее плотность меняются с глубиной погружения. Как подводная лодка, так и вода сжимаемы и занимают на больших глубинах меньший объем. Кроме того, на плавучести сказывается и температура воды, изменяющаяся с глубиной.
Разница в температуре по вертикали, или, как говорят физики, температурный градиент[6], для устойчивого равновесия лодки должна превышать примерно 0,05 градуса на метр глубины. Подобные градиенты часто встречаются на глубинах, меньших 100 метров, и в таких участках, получивших название «жидкий грунт», «термоклин» или слой скачка, подводная лодка может застыть в воде с неработающим двигателем.
Опасность может возникнуть и при горизонтальном температурном градиенте, когда лодка с ходу из холодной воды попадает в теплую и, следовательно, менее плотную массу, что приводит к мгновенному возрастанию погружающей силы. Температурный скачок в 7–8 градусов для подводной лодки большого водоизмещения даст возрастание погружающей силы на несколько тонн, и абсолютно исправная и герметичная подводная лодка может камнем пойти ко дну. Такой же эффект могут вызвать и так называемые внутренние волны, о которых мы скажем ниже. Кто знает, может быть, в этом и состоит причина гибели «Трешера» — американской атомной подлодки, затонувшей в Гольфстриме?
И еще одна особенность — плотность воды возрастает с соленостью. Это может оказаться опасным для подводной лодки, движущейся, скажем, к речному устью: если внимательно не наблюдать за глубиномером, лодка может внезапно оказаться на дне.
Много причин влияет на плавучесть, и поэтому лодки снабжаются не только указателями глубины, но и самопишущими термометрами, а иногда также и измерителями солености.
На управлении лодкой по глубине может сказаться и циркуляция вод в океане, вызванная совместным действием ветра (поверхностные слои передают напряжение подстилающим) и разностями температуры и плотности. Механизм этой циркуляции сводится к следующей схеме. Когда поверхность воды охлаждается при соприкосновении с холодным воздухом или в ре зультате испарения (отбирающего тепло) или же когда из-за испарения или замерзания увеличивается соленость, то увеличивается и плотность воды. Если эти процессы достаточно интенсивны, то воды в поверхностном слое становятся тяжелее, чем подстилающие, и опускаются. Относительно более легкие воды поднимаются на их место, и, таким образом, возникает вертикальная циркуляция. Едва заметные изменения температуры и солености могут вызвать перепады давления, которые приводят в вертикальное и горизонтальное движение целые океаны.
Уже говорилось, что подводную лодку точнее было бы назвать ныряющей, поскольку под водой она может передвигаться ровно столько, насколько хватает энергии аккумуляторных батарей. В подводном положении работа двигателя внутреннего сгорания невозможна: он сразу «съест» весь запас кислорода, и экипажу станет нечем дышать. Правда, с появлением на лодках (пока — военных) атомных двигателей все изменилось. Теперь время движения под водой — не проблема.
Проблемой до сих пор остается скорость. Современная аккумуляторная лодка может давать 15 узлов (это около 28 километров в час) подводного хода, и то на короткое время. На какие только ухищрения не идут инженеры и конструкторы, но скорость растет медленно, в то время как в авиации за недолгий сравнительно срок достигнут колоссальный рост скоростей.
Интересно отметить, что одна из помех движению надводного судна отсутствует у подводных лодок — это поверхностная волна, расходящаяся при движении от каждого борта. На создание двух таких волн уходит большая часть (до нескольких сотен лошадиных сил) общей мощности судна, а это, конечно, не проходит бесследно: скорость заметно снижается. А вот лодке такие потери не угрожают: если ей придана хорошо обтекаемая форма, то при той же мощности она может двигаться в подводном положении быстрее, чем в надводном.
Наконец, связь. Для нее вода как физическая среда создает ряд специфических трудностей. Даже в самой прозрачной океанической воде (она имеет зелено-голубой цвет) можно увидеть предмет на расстоянии всего в несколько десятков метров. Применение радио и, стало быть, радиолокации чрезвычайно ограниченно из-за непроницаемости воды для электромагнитных волн. Ведутся работы по применению для подводного обнаружения и связи квантовых генераторов (лазеров), но они еще не вышли из стадии эксперимента.
Остается звук. Пока это единственно надежное средство для передачи информации под водой, хотя и тут есть свои трудности. Во всяком случае, экипаж подводной лодки принимает решения и действует при гораздо меньшем объеме информации, чем, например, экипаж самолета.
Скорость звука в воде близка к 1500 метров в секунду. Это много ниже скорости распространения электромагнитных волн, так что сведения об удаленных событиях заметно запаздывают. Кроме того, звуковая волна в воде по сравнению с волной в воздухе характеризуется высокими давлениями и малыми смещениями. Это совершенно меняет характер микрофонов и излучателей, заставляя применять магнитострикционные и пьезоэлектрические преобразователи. Звук весьма слабо передается через поверхность раздела вода — воздух, в другую среду переходит ничтожная часть падающей волны. Следовательно, поверхность моря является почти идеальным отражателем звуковых волн.
В толще воды, и особенно вблизи поверхности моря, есть множество мелких пузырьков. Обычно они возникают вследствие волнения и других причин, но влияние, которое они оказывают на распространение звука, далеко не пропорционально малому объему, который они занимают. Если, например, один пузырек диаметром 1 миллиметр приходится в среднем на 1 кубический метр воды, то это для глубины около 10 метров уменьшает скорость распространения в 4,5 раза. Причина этого — отличная от воды сжимаемость пузырьков, искажающая акустическую характеристику среды.
Пузырьки, планктон, рыбы действуют как рассеивающие центры для энергии, сконцентрированной в каком-либо ограниченном звуковом пучке. Океан содержит большое количество такого рассеивающего материала, а некоторые рыбы и ракообразные сами производят звуки. Все это создает большие помехи для получения точной информации под водой с помощью звука.
Главным фактором, искажающим подводную картину, «видимую» при помощи акустики, является искривление (рефракция) звуковых лучей. Ведь вода в океане только на первый взгляд кажется однородной средой. На самом же деле ее температура, соленость, плотность не везде одинаковы, естественно поэтому, что коэффициент преломления постоянно меняется, меняется и скорость звука. Особенно сильно влияют на распространение звуковых волн температурные условия на первой сотне метров под уровнем моря, наиболее зависимой от времени года, времени дня, облачности, скорости ветра и прочих метеорологических факторов. Здесь температурные скачки могут быть настолько резкими, что целые участки моря оказываются почти непроницаемыми для звуковых сигналов.
Итак, если учесть, что все перечисленные отрицательные факторы проявляют себя в море, которое ограничено сверху колеблющейся отражающей поверхностью, а снизу — неправильным по форме и непостоянным по условиям отражения дном, приходится, пожалуй, удивляться самой возможности эффективного использования акустических средств. Грубой аналогией из области оптики явились бы условия видимости в помещении, ограниченном колеблющимися зеркалами и наполненном клубами пара и светящимися точками. Однако основательное изучение свойств моря и кропотливая разработка и усовершенствование оборудования привели к созданию гидроакустической аппаратуры, которая удовлетворяет наиболее насущным нуждам подводного плавания и позволяет осуществлять шумопеленгование, гидролокацию и подводную связь.
Шумопеленгование, как показывает название, представляет собой прием шумов, приходящих к подводной лодке от каких-либо звучащих объектов, и определение направления (пеленга) на них.
Гидролокация сродни радиолокации. Излучатель с подлодки посылает в воду короткий звуковой импульс. Затем производится автоматическое переключение на приемное устройство, и излучатель превращается в гидрофон, способный принять эхо. Типичный гидролокационный излучатель представляет собой «акустический прожектор». Он может изменять направление относительно курса лодки, а иногда и наклон посылаемого звукового пучка. Расстояние до обнаруженного объекта вычисляется по времени пробега посланного импульса.
Таковы в главных чертах устройство и действие любой подводной лодки. Для возникновения сегодняшней флотилии научно-исследовательских подводных судов не потребовалось революционных технических изобретений или ломки прежних понятий, как это случилось при покорении космоса.
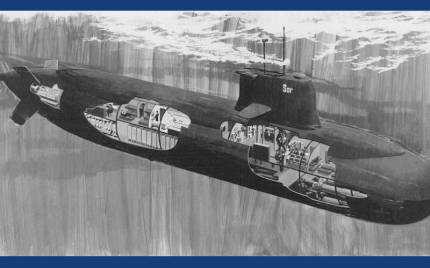
Подводное кораблестроение сложилось как самостоятельная отрасль судостроения еще на рубеже XIX и XX столетий. Но почему же научно-исследовательские подводные лодки строятся и спускаются на воду только сейчас? Такой вопрос может возникнуть у многих так же, как он волновал меня в 1957 году во время работы над проектом переоборудования боевой подводной лодки в «Северянку». Смонтировать иллюминаторы, установить вместо вооружения научную аппаратуру — эти задачи для судостроителей не представили бы особых затруднений, если бы их пришлось решать и раньше. Но таких задач до последнего времени никто и не ставил.
Очевидно, главные причины массового появления научно-исследовательских подлодок следует искать не в прогрессе техники, который, несомненно, в таких случаях всегда играет способствующую роль, а в изменившемся отношении человечества к океану и его потенциальным возможностям. На развитие океанологии и других морских наук, куда в первую очередь входят исследования, направленные на развитие рыболовства, стали выделяться более крупные средства. Растущее внимание к океану заставило по-новому посмотреть и на подводную лодку — с точки зрения ее пригодности для науки.
К сегодняшнему дню число подводных судов науки, по-видимому, уже превысило 150, если относить сюда и подлодки, которые, как обычно указывают в рекламных проспектах фирмы-изготовители, строятся и могут использоваться не только для научных, но и для производственных и туристских целей — в зависимости от спроса. Примером могут служить построенные западногерманской фирмой «Сильвестр» двухместные лодочки с рабочей глубиной погружения 35 метров. Первая партия из 15 таких лодок была изготовлена еще в июне 1964 года, следующая партия, около 20 штук, была поставлена во Францию и Италию.
Исследовательские подлодки более маневренны, чем боевые. Некоторые из них имеют вертикальный мотор для зависания подобно вертолету, другие для улучшения поворотливости снабжены добавочным носовым или кормовым винтом, иногда в так называемой поворотной насадке. Характерно, что блюдцеобразные лодки, отдаленно напоминающие своей формой донных рыб, например камбал, обладают хорошей маневренностью в горизонтальной плоскости, а лодки, поперечное сечение которых подобно сечению тела рыб, обитающих в толще воды, хорошо маневрируют по вертикали.
Большинство используемых сейчас для научных целей лодок имеет малую скорость, незначительную дальность плавания и рассчитано на умеренные глубины. С одной стороны, малая скорость — это достоинство. Именно медленное движение, граничащее с остановками, создает наилучшие условия для поиска объектов, их рассматривания, уменьшает влияние подлодки как источника механических колебаний на окружающую среду, экономит энергию аккумуляторной батареи и, следовательно, позволяет дольше оставаться под водой. Но, с другой стороны, при небольшой скорости лодка хуже управляется, она не может противостоять течению, быстро переходить из одной точки наблюдения в другую или перемещаться. Удерживать движущийся объект (например, буксируемый прибор или рыболовный трал) в поле видимости или слышимости для такой лодки — задача невыполнимая. А если нужно быстро измерить температуру или соленость вдоль какого-то направления, то есть, говоря иначе, выполнить температурный разрез? Или обследовать заданный район в минимальный срок? Идеальным было бы сочетание малой скорости (1–2 узла) с высокой (10–15 и более узлов), но как этого добиться? Высокая скорость, да еще поддерживаемая в течение длительного времени, требует мощного и крупного источника энергии, то есть громадных аккумуляторных батарей. Установка же громоздкой и тяжелой батареи потребует увеличения водоизмещения. Получается круг, из которого трудно вырваться: заданная скорость хода и дальность плавания лодки повлияют на водоизмещение еще при проектировании, а водоизмещение зависит, оказывается, и от глубины погружения. Схема здесь такая: чем глубже, тем прочнее и толще должен быть водонепроницаемый корпус, тем тяжелее лодка, но и тем больше ее объем, обеспечивающий необходимую плавучесть.
Сегодня экономическая подводная скорость (то есть скорость хода, при которой расход энергии на одну милю пути наименьший, а дальность плавания наибольшая) не превышает 2–4 узлов. А подводная дальность непрерывного плавания исчисляется в среднем несколькими десятками миль. Особняком стоят большие подлодки, такие, как «Северянка» или «Бен Франклин». Они способны проходить под водой сотни миль. Однако если малым ходом лодка может идти под водой десятки часов, то дать самый полный ход она может лишь на какой-то час. Но и этого достаточно, чтобы израсходовать энергоресурсы аккумуляторной батареи полностью. Зарядку аккумуляторов делают с помощью дизель-генератора обеспечивающей плавбазы или в порту. Большие лодки способны эту процедуру выполнять и самостоятельно своим дизелем. Тем же самым, который позволяет над водой плыть на десятки тысяч миль.
Около 30 процентов всех исследовательских лодок способно погружаться не глубже 30–50 метров, достичь 100-метрового рубежа могут 66 процентов лодок, в том числе и глубоководные, рассчитанные на километровые глубины; на 300 метрах могут работать 37 процентов лодок, на 600 — 23, на 1000 — 14, на 2000 — 6, на 6000 — 2 процента; на 11000 метров рассчитана одна подводная лодка — «Архимед», принадлежащая Франции. Установивший рекорд глубины «Триест-1» переделан в «Триест-2» с меньшей глубиной погружения. Любопытно, что лодки редко погружаются до предела своих возможностей. Американская «Дип Куэст» за два года лишь дважды побывала на рабочей глубине. По-видимому, достижение глубины — это не всегда главное. Зачем, скажем, подлодке, занятой изучением волнения моря с помощью направленного вверх эхолота, погружаться слишком глубоко? Даже в шторм достаточно погрузиться на несколько десятков метров и избавиться от мешающего влияния волнения. Главное — это выполнение научной программы.
Зрительное наблюдение на подводных лодках ведут через иллюминаторы или оптические трубы. Есть лодки с замкнутой телевизионной системой[7], иногда она заменяет иллюминаторы. Почти все лодки имеют наружные светильники для улучшения условий видимости и для обеспечения фото- или киносъемки.
Как известно, условия видимости под водой зависят от освещенности (естественной или искусственной) и прозрачности морской воды. На ее величину влияет количество взвесей, находящихся в море. Поэтому при удалении от берега обычно прозрачность морской воды увеличивается.
По сообщению Жака Пикара, гидронавты, совершавшие в 1969 году дрейф на лодке «Бен Франклин» в струе Гольфстрима, встретили водную массу, прозрачность которой была около 100 метров, то есть превышала традиционную «сверхпрозрачность» Саргассова моря, достигающую 66 метров.
Привыкший к темноте человеческий глаз может определить проникновение дневного света до глубины 800 метров. Его полное исчезновение, регистрируемое чувствительной фотопластинкой, происходит на глубинах, превышающих 1500 метров. И все равно, в морской воде нет такой прозрачности, как в космическом пространстве или хотя бы в атмосфере. Искусственный спутник с высоты 36 000 километров «видит» около 30 процентов поверхности нашей планеты, а с высоты, допустим, 200 километров площадь обзора уменьшается до 3 процентов; в поле зрения наблюдателя, находящегося на вершине Останкинской башни (534 метра), попадает 0,00002 процента поверхности Земли. А в поле зрения подводного наблюдателя попадает совсем уж ничтожный процент площади дна даже при редкой прозрачности 60 метров. При угле обзора направленного вниз иллюминатора 60 градусов и хорошей освещенности диаметр «высматриваемого» круга немногим превысит 50 метров. Это значит, что в отличие от привычных земных условий километр как мера длины под водой должен быть заменен метром.
Многие подлодки снабжены манипуляторами (механическими руками) для сбора образцов и выполнения рабочих операций. Оператор управляет манипуляторами, наблюдая через иллюминаторы или с помощью телевидения. Манипуляторы снабжаются сменным рабочим инструментом: захватом, черпаком, буром или стаканом для взятия проб грунта. Часть лодок можно назвать «однорукими», они имеют по одному манипулятору. На других — два и даже четыре. Из них два верхних нужны для выполнения рабочих операций, а два нижних — для закрепления лодки у дна. Пока еще подводные манипуляторы далеки от совершенства, в основном из-за того, что трудно удержать подлодку неподвижно над объектом работ. Оператору требуются минуты для выполнения действий, которые по обстановке иногда должны выполняться за секунды. Нужна большая ловкость и осторожность, особенно если хочешь поймать живое существо, даже такое сравнительно малоподвижное, как омар или краб.
28 августа 1963 года командиру американской научно-исследовательской подводной лодки «Триест-2» Кичу потребовалось 15 минут, чтобы захватить манипулятором кусок медного трубопровода погибшей подлодки «Трешер», весивший 4,5 килограмма. Пилот «Элвина» Рэйни сообщает, что также около 15 минут уходит на взятие с помощью манипулятора колонки грунта длиной 45 и диаметром 5,75 сантиметра. Эта манипуляция состояла из выбора удобного места у дна в поле зрения иллюминатора, извлечения грунтовой трубки из рамы, внедрения трубки в осадочный слой, извлечения из грунта и установки в раму. Рэйни считает, что на суше эта работа могла бы быть выполнена любым рабочим и заняла бы около минуты. Проблему составляет пока и навигация малой подводной лодки. Основные средства навигации здесь — компас, эхолот и лаг. Сложность состоит в том, что невозможно применить обычные для мореплавания ориентиры и способы определения места — по небесным светилам, маякам, знакам или радиомаякам. Малой подлодке легко «заблудиться» из-за неточного знания курса и скорости, времени, затрачиваемого на обход препятствий при плавании у дна, и главное — из-за сноса течениями.
Поэтому такая подводная лодка все время держит гидроакустический контакт с обеспечивающим надводным судном, снабженным, как правило, средствами точного кораблевождения.
На больших лодках можно установить инерциальную навигационную систему. Несмотря на то что принцип действия этой системы чрезвычайно прост, ее создание потребовало привлечения самых последних достижений в области гироскопических приборов, механики, вакуумной и вычислительной техники.
Представим себе, что нам точно известно исходное место движения подводной лодки. Переход от состояния покоя или равномерного прямолинейного движения к движению с другой скоростью невозможен без ускорений. Ускорения можно точно замерить с помощью инерциальных датчиков (акселерометров) на основе второго закона механики. По ускорениям можно рассчитать скорости и, следовательно, пройденное расстояние. Все эти операции автоматически выполняет сложный и пока относительно громоздкий комплекс аппаратуры, который и называется инерциальной системой.
Ее главное преимущество — в полной независимости от внешних источников навигационной информации. Значит, подводная лодка, определив перед погружением свое место, например радионавигационным способом или с помощью навигационных спутников Земли, может плавать довольно продолжительное время, не всплывая. При этом разница между счислимым (расчетным) и фактическим местом увеличивается незначительно. Например, во время трансполярного перехода атомной подводной лодки «Наутилус» (1958 год) ошибка в расчетном месте достигла 10 миль после прохождения подо льдами расстояния, равного 1830 милям (ошибка чуть более 0,5 процента).
Другой вид современной навигационной аппаратуры — гидроакустические, иначе доплеровские лаги. Входящая в состав лага электронно-вычислительная машина вычисляет по скорости величину пройденного расстояния относительно дна. Таким образом — и это очень важно — учитываются влияние течений и боковые перемещения. Принцип действия лага основан на эффекте Доплера[8]: скорость подводной лодки измеряется по разности частот гидроакустических сигналов, излучаемых четырьмя преобразователями под углом 80 градусов к вертикали, и их отражений от морского дна. Гидроакустические лаги дают ошибки при определении малых скоростей (до 2 узлов). А это как раз находится в диапазоне экономической скорости большинства научно-исследовательских подводных лодок.
Малые лодки доставляются обычно в район исследований на борту надводной обеспечивающей плавбазы или на буксире. Когда искали водородную бомбу у берегов Испании, малые лодки перебрасывали на транспортных самолетах, а потом перегружали на борт надводного судна. Ограниченный запас энергии и плохие мореходные качества для плавания на поверхности заставляют малую лодку полностью зависеть от обеспечивающего судна-носителя. Причем спуск подлодки на воду и подъем с воды в штиль при наличии спуско-подъемного устройства не представляют трудности. Но уже при небольшом волнении перегрузочная операция перерастает в спасательную. Плавбаза должна подойти к раскачивающейся и заливаемой волнами лодке, закрепить подъемный трос, бережно поднять лодку, аккуратно поставить в гнездо на неустойчивой палубе и транспортировать к следующей точке погружения. На малых лодках численность экипажа невелика, а длительность одного погружения не превышает нескольких часов.
Естественно, что так называемой обитаемости на таких лодках большого значения не придается. Исследователи-гидронавты либо сидят как в малолитражном автомобиле, либо лежат на амортизирующих матрасах, приблизившись лицом к иллюминатору. Углекислый газ удаляется химпоглотителем, кислород из баллонов подается в атмосферу лодки через определенное время. Проблемы питания и санитарии сведены к минимуму.
Другое дело — большие подводные лодки, способные находиться под водой неделями. Тогда обитаемость становится в один ряд с оснащением научной аппаратурой и другими техническими характеристиками. Она превращается в одно из важнейших качеств исследовательской подводной лодки, поскольку прямо влияет на работоспособность экипажа. В идеале человек в герметичном корпусе лодки должен иметь возможность нормально дышать, принимать пищу, выполнять ту или иную работу и отдыхать, то есть делать все то, что он обычно делает на суше. Если квалифицировать деятельность гидронавта под водой как обычную работу в необычных условиях, то для ее нормального выполнения нужно всемерно снижать необычность окружающей обстановки. Здесь и создание нужного микроклимата, и поддержание неизменного газового состава воздуха, и снижение шумности, и рациональная организация труда, отдыха, питания и даже медицинского обслуживания. Для исследовательской подлодки с атомным источником энергии появляется еще один, пожалуй, самый важный фактор — безопасная радиационная обстановка в отсеках.
Тема эта очень обширна, и поэтому останавливаться подробно на каждом факторе невозможно. На больших лодках в этом смысле сделано многое, начиная от индивидуальных спальных мест и горячего четырехразового питания до надежной биологической защиты. Так, во время наших плаваний на «Северянке» каждый член научной группы «базировался» на свою подвесную койку в носовом отсеке. Чтобы компенсировать недостаток солнечного света, корабельный врач производил периодическое облучение каждого члена экипажа кварцевыми лампами. Но были и свои «но». Во время плавания в северных широтах температура в носовом отсеке падала до 8 градусов. Приходилось и работать и спать в меховой одежде. В научном посту «Северянки» была организована двух-, а реже трехсменная вахта у иллюминаторов и приборов (соответственно по три или по два научных сотрудника в каждой смене в зависимости от программы наблюдений). И хотя во время длительных экспедиционных походов (25–30 суток) самочувствие и работоспособность исследователей были хорошими, двухсменная вахта все-таки изнуряла. Чтобы наблюдения шли непрерывно, была отработана взаимозаменяемость. Члены научной группы овладели «смежными» профессиями.
Кстати, об этом говорит и X. Свердруп, делясь опытом плавания на «Наутилусе». Правда, там четырехчасовая вахта в две смены была установлена не для научных сотрудников (их было всего трое), а для экипажа. «Это трудное испытание команды. При четырехчасовой вахте никогда не удается спать больше трех часов подряд, и если даже за сутки получается достаточный период отдыха, то все же от этого устаешь, ходишь с красными глазами и мечтаешь о продолжительном непрерывном ночном сне». Между прочим, «Наутилус» все время находился только в надводном положении. При погружениях нагрузка (особенно психическая) на одного члена экипажа, учитывая, что команда была неукомплектована, должна была бы значительно возрасти.
Погружение подлодки — специфический вид ее маневрирования.
Погружение может быть нормальным или обычным, когда лодка спокойно перемещается в нужный горизонт глубины и скорость погружения не имеет решающего значения. При срочном погружении нужно «нырнуть» с наивозможнейшей быстротой. Третья разновидность — погружение с заданной скоростью. Например, американская исследовательская подводная лодка «Элвин» во время обычного погружения 23 августа 1965 года достигла глубины 870 метров за 93 минуты. Она шла со средней скоростью 9 метров в минуту. Всплывала быстрее — около 13 метров в минуту. Нет сомнения в том, что и погружение и всплытие могли бы быть совершены быстрее или медленнее, но это не диктовалось обстановкой. По-видимому, эта скорость устраивала исследователей, производивших наблюдения в толще воды.
Рекордное погружение «Триеста» 23 января 1960 года на глубину 10 919 метров заняло 4 часа 43 минуты, причем до глубины 7800 метров подлодка шла вниз со скоростью 0,9 метра в секунду, затем скорость уменьшилась до 0,6 метра в секунду и после глубины 9000 метров — до 0,3. В самом начале погружение было очень медленным: 100 метров за 10 минут. Затем лодка остановилась, встретив слой холодной воды. Для дальнейшего погружения пришлось «утяжелиться», выпустив немного бензина[9]. Еще через 10 минут следующий слой холодной воды снова задержал погружение. Была выпущена еще одна порция бензина. Затем через 5 минут последовала остановка на глубине 130 метров и еще через 7 минут на глубине 160 метров. Жак Пикар, совершавший свое 65-е погружение, впервые наблюдал такой «саморегулирующийся» спуск. Глубже 200 метров температура воды стала равномернее, и погружение пошло без остановок. Наоборот, здесь начало сказываться сжатие бензина, и скорость погружения все нарастала — пришлось время от времени сбрасывать твердый балласт (при погружении на каждые 915 метров «Триест» сбрасывает около тонны балласта). Эта мера позволила снизить скорость погружения перед посадкой на грунт до 0,15 метра в секунду и уменьшить силу возможного удара о дно.
Что такое срочное погружение, я узнал на «Северянке». 12 января 1959 года лодка находилась в Северной Атлантике у Фарерских островов в надводном положении. Работали оба дизеля, шла зарядка аккумуляторной батареи. В этот момент вахтенный научный сотрудник ихтиолог Б. С. Соловьев с помощью эхолота обнаружил плотное скопление рыбы. На эхограмме обозначилось большое темно-коричневое «крыло». Верхняя граница обнаруженной рыбы — на глубине 110 метров. До этого мы наблюдали в иллюминаторы только отдельные, рассеянные в толще воды экземпляры атлантическо-скандинавской сельди, и упускать случай было нельзя.
Нужно срочно было нырять в косяк, но до конца рассчитанного режима зарядки оставалось десять минут, и командир лодки В. П. Шаповалов попросил у меня, начальника экспедиции, немного повременить. Договорились на том, что лодка будет ходить над косяком пока не кончится зарядка. Включили гидролокатор и ультразвуковым лучом «зацепились» за рыбу. Но вот все готово. По команде «срочное погружение» старший трюмный поворачивает рычаг, в верхней части каждой цистерны открываются клапаны вентиляции — отверстия, через которые стравливается воздух. Вода заполняет цистерны, лодка быстро «набирает вес» и уходит на глубину. В отличие от обычного погружения для создания отрицательной плавучести вода принимается и в так называемую цистерну быстрого погружения, которая перед достижением заданной глубины продувается.
Мы ныряем в косяк на глубину 120 метров с расчетом вонзиться в его вершину, граница которой по-прежнему на 110 метрах. Общая высота косяка 40–50 метров. Гидроакустик докладывает, что наша цель — прямо по носу. Наклонившись вперед форштевнем, лодка стремительно скользит вдоль луча гидролокатора. Светильники выключены, чтобы не напугать рыбу. У каждого иллюминатора — по два наблюдателя.
Глубина 120 метров. Одновременно включаем все светильники, чтобы застать рыбу врасплох. Но за иллюминаторами — ничего, если не считать мелькающих золотистых точек планктона. А эхолот свидетельствует, что косяк ниже лодки примерно на 10 метров. Выключаем свет, погружаемся глубже. Косяк опять ниже нас. Ныряем еще раз, и снова преследование не в нашу пользу. Добыча не подпускает к себе. Один только раз, что называется краем глаза, усмотрели внизу и в стороне от лодки стайку в 10–12 сельдей, быстро и согласованно проплывшую параллельным курсом.
И хотя никто не засекал время, можно утверждать, что срочное погружение на глубину 120 метров длилось десятки секунд, во всяком случае не больше минуты. Если принять эту цифру, то величина вертикальной составляющей скорости подводной лодки будет примерно равна 2 метрам в секунду.
Погружение с заданной скоростью необходимо, чтобы проследить какое-либо явление, например, суточное вертикальное перемещение (миграцию) морских организмов. Такое погружение, как и обычное, может прерываться остановками (парением) на разных уровнях. Чтобы так погружаться, нужно обладать большим искусством управления лодкой, особенно в верхних слоях воды, где бывают резкие скачки плотности.
Всплытие подлодки опять-таки может быть нормальным и срочным (аварийным). Всплытие с зад
librolife.ru
|









korabley.net
Таинственный подводный мир или корабли другой цивилизации

Таинственная подводная цивилизация или корабли из другого мира
1902 год — в Гвинейском заливе, рядом с Западной Африкой, британский корабль «Форт Солсбери» встретился с загадочным объектом огромных размеров. В начале вахтенный рассмотрел над поверхностью воды два огня, красного цвета, а посмотрев в бинокль, четко увидел большой темный объект до 180 метров в длину, на концах которого и горели огни.
Вахтенный вызвал второго помощника капитана А. Реймера, и тот так-же увидел таинственный объект, перед тем как тот ушел в пучины океана.
Позднее все очевидцы пришли к выводу, что они видели некий глубоководный аппарат. Хотя почти все отмечали чешуйчатую поверхность загадочного объекта, никому и в голову не приходила мысль, что они видели неизвестное науке животное. Перед тем как объект погрузился вокруг него забурлила вода, как видно, был задействован некий механизм.
Реймер описал в судовом журнале явление этого таинственного объекта как «немного пугающее». Он написал: «Мы не могли увидеть всех деталей в темноте, но объект был 500—600 футов в длину с двумя огнями, по одному в каждой стороне. Некий механизм или, возможно, плавники производили большое волнение. Мы видели, что его бока покрыты чешуей, а после оно медленно скрылось из нашего поля зрения».
Что это могло быть? Чей «Наутилус» видели британцы? Ни одна страна в те времена не имела возможности создать подводный аппарат таких огромных размеров, а если бы и создала, то это сразу бы стало достоянием гласности. Очень любопытно упоминание о чешуйчатой поверхности объекта, возможно, именно это дает возможность загадочным подводным аппаратам развивать под водой просто невероятные скорости, которые попросту привели в изумление военных моряков уже во второй половине ХХ столетия.
1960 год, январь — сторожевые корабли Аргентины, обнаружили у себя в территориальных водах две неизвестные субмарины гигантских размеров. Одна из них лежала на грунте, а другая кружила вокруг нее. После безрезультатных попыток добиться, чтобы подводные лодки всплыли на поверхность, их забросали большим количеством глубинных бомб.
К удивлению аргентинцев, субмарины не только уцелели, а всплыли и на огромной скорости начали уходить от преследования. Это были абсолютно фантастические корабли. Огромные шаровидные рубки возвышались над водой, корпуса субмарин поражали невероятностью своих форм.
Потому как эти таинственные корабли явно выигрывали в скорости и стремительно отрывались от погони, аргентинцы открыли по ним огонь из всех орудий. Загадочные подводные лодки тут же ушли под воду. Там с ними начало происходить нечто очень необыкновенное: приборы стали показывать, что из двух под лодок вначале стало четыре, потом — шесть… потом все эти объекты развили неимоверную скорость и исчезли в глубинах Атлантики.
1967 год — представители Аргентины снова повстречали таинственный подводный объект. Аргентинский торговый корабль «Навьеро» находился в водах Южной Атлантики. Утром, около десяти часов моряки увидели, что к кораблю подошел на небольшой глубине сигарообразный объект, длиной примерно сорок метров. Поверхность таинственного аппарата была освещена каким-то загадочно тусклым свечением, все время меняющим световую гамму.
Вот что было записано в вахтенном журнале аргентинского корабля: «20 июля 1967 года, 120 миль от побережья Бразилии, 6 ч 15 мин пополудни. Офицер Хорхе Монтойя доложил, что вблизи корабля появился странный объект. Прибыв на палубу, капитан увидал приблизительно в 50 футах по правому борту сияющий предмет. Он был сигарообразной формы, его длина составляла приблизительно 105—110 футов (36 метров). От него исходило мощное голубовато-белое сияние, при этом он не издавал абсолютно никаких звуков и не оставлял следов на воде. Было не видно ни перископа, ни поручней, ни башни, ни надстроек — вообще никаких выступающих частей. Загадочный объект на протяжении четверти часа двигался параллельно «Навьеро», потом абсолютно неожиданно нырнул, прошел непосредственно под кораблем и быстро исчез в глубинах, излучая под водой яркое сияние».
Скорость движения загадочного объекта все время изменялась, чувствовалась его хорошая управляемость и маневренность. Разумеется, не могло идти и речи о том, что моряки видели какое-то гигантское морское животное. По описаниям моряков специалисты сделали заключение, что аргентинцы, скорее всего, встретили некую таинственную подводную лодку, которой нет на вооружении ни у одной из стран мира.
С загадочными подводными аппаратами встречались и американцы. 1963 год — во время военно-морских учений у берегов Пуэрто-Рико американцы обнаружили неопознанный подводный объект, передвигающийся с необыкновенно большой скоростью — больше 150 узлов — почти 280 км/час! Это было в три раза больше максимальной скорости субмарин! таинственный объект не только ставил рекорд скорости, но и производил маневры на очень больших глубинах, в несколько раз превышающих возможности современных подводных лодок. При этом объект с такой скоростью перемещался по вертикали, сопровождающиеся огромным ростом давления, что если бы он был творением нашей техники, его бы попросту разорвало на куски…
Куда более драматические события произошли во время проведения маневров флота США в Тихом океане поблизости Индонезии, где глубины доходят до 7 500 метров. Во время маневров акустиками был зафиксирован шум от подводной лодки, который отличался от шумов лодок, которые брали участие в маневрах. Разумеется, такое обстоятельство совершенно не вписывалось в планы американского командования, и потому одна из субмарин была отправлена на сближение с неопознанной лодкой. Но такая попытка выдавить незнакомца из зоны маневров окончилась трагично — американская подводная лодка столкнулась с неизвестной субмариной.
Как результат произошел сильнейший подводный взрыв. Согласно данным, которые были получены с локаторов соседних судов, обе подлодки затонули. Так как на американских кораблях, бравших участие в маневрах, имелось оборудование для проведения спасательных работ на больших глубинах, был произведен спуск спасательной команды, первоочередная задача которой была розыск любых обломков и предметов с неизвестной подлодки.
Команда смогла поднять несколько кусков металла, одни из которых напоминали фрагменты перископа обычной субмарины, среди них был и кусок, похожий на фрагмент листовой обшивки. Работы по поиску фрагментов погибших подводных лодок пришлось прекратить спустя несколько минут после подъема находок на борт флагмана, акустики флота сообщили, что к месту катастрофы подходят пятнадцать неопознанных субмарин. Один из объектов был длинной около 200 метров!
Перепуганное флотское командование тут же отдало приказ приостановить маневры и не отвечать на любые действия потенциального противника. Появившиеся непонятно откуда субмарины наглухо заблокировали место катастрофы, создав нечто вроде «купола», недоступного для любых типов локаторов. Одна из американских подводных лодок все же сделала попытку подойти ближе к месту катастрофы, но у нее неожиданно отказали почти все приборы, с большим трудом ей удалось произвести аварийное всплытие.
Конечно, предпринималась попытка осуществить контакт с неизвестными подлодками, но она оказалась безрезультатной. Одна из неопознанных подводных лодок отделилась от остальных субмарин и описала круг под кораблями американцев, в результате у всех у них прекратили работу все локаторы, приборы и средства связи. После того как она удалилась на значительное расстояние все приборы заработали вновь.
Только спустя несколько часов с экранов локаторов исчезли сигналы таинственных подлодок. Разумеется, предприняли новую попытку обследовать место столкновения, как оказалось, с места катастрофы исчезли не только обломки чужой подлодки, но и останки американской субмарины. В распоряжении американцев остались только фрагменты, которые смогли так оперативно поднять. Их исследования проводились в лабораториях ЦРУ, причем было вынесено заключение, что состав металла одного из обломков не известен, а некоторые из химических элементов в нем вообще не знакомы современной науке. После этого любая информация об этом инциденте была засекречена.
1965 год, январь – летчик Брюс Кати, пролетая над гаванью Кайпара, к северу от Хеленсвилла в Новой Зеландии, заметил внизу странный объект, на первый взгляд, походивший на кита. Присмотревшись внимательнее, пилот пришел к выводу, что под ним подлодка длиной около 100 футов весьма странной конструкции. Он доложил об этом службам ВМФ Новой Зеландии, но ему ответили, что объект никак не может быть субмариной, так как подводных лодок в этом районе нет, да и после отлива в этом районе довольно мелко.
Как видно, летчик наблюдал одну из таинственных субмарин обитателей океана.
1972 год — патрульные корабли Норвегии, обнаружили в территориальных водах своей страны неизвестную подлодку. Все попытки войти с ней в контакт и определить ее принадлежность закончились ничем. Поражало, что неизвестная подводная лодка передвигалась на скорости около 150 узлов (250—280 км/час)! Это при том, что максимально допустимая скорость самых современных атомных субмарин достигает всего 80 км/час.
Не получив ответ на свои запросы, норвежцы вместе с патрулем флота НАТО предприняли попытку уничтожить подлодку. После произведенного залпа таинственная субмарина почти мгновенно погрузилась на глубину около 3 000 метров и исчезла с экранов радаров. Надо заметить, что максимальная глубина погружения атомных субмарин не превышает 2 000 метров, так что все попытки обвинить в данном инциденте Советский Союз закончились провалом.
Не следует думать, что после 60—70 х годов ХХ столетия в океанах и морях перестали наблюдать странные объекты, просто их происхождение начали все чаще связывать с инопланетянами. Соответствует ли это истине? Вряд ли, хотя, конечно, и корабли пришельцев тоже могут вносить свою лепту в статистику наблюдений таинственных подводных объектов.
А.Сидоренко
ред. shtorm777.ru
ПОХОЖИЕ ЗАПИСИ
shtorm777.ru