это… Определение, виды, принцип действия. Радиолокационная станция
Радиолокация — это совокупность научных методов и технических средств, служащих для определения координат и характеристик объекта посредством радиоволн. Исследуемый объект часто именуют радиолокационной целью (или просто целью).
Принцип радиолокации
Радиотехническое оборудование и средства, предназначенные для выполнения задач радиолокации, получили название радиолокационных систем, или устройств (РЛС или РЛУ). Основы радиолокации базируются на следующих физических явлениях и свойствах:
- В среде распространения радиоволны, встречая объекты с иными электрическими свойствами, рассеиваются на них. Волна, отраженная от цели (или ее собственное излучение), позволяет радиолокационным системам обнаружить и идентифицировать цель.
- На больших расстояниях распространение радиоволн принимается прямолинейным, с постоянной скоростью в известной среде. Это допущение делает возможным измерение дальности до цели и ее угловых координат (с определенной ошибкой).
- На основании эффекта Доплера по частоте принятого отраженного сигнала вычисляют радиальную скорость точки излучения относительно РЛУ.
Историческая справка
На способность радиоволн к отражению указывали великий физик Г. Герц и русский электротехник А.С. Попов еще в конце XIX века. Согласно патенту от 1904 года, первый радар создал немецкий инженер К. Хюльмайер. Прибор, названный им телемобилоскопом, использовался на судах, бороздивших Рейн. В связи с развитием авиационной техники применение радиолокации выглядело очень перспективным в качестве элемента противовоздушной обороны. Исследования в этой области велись передовыми специалистами многих стран мира.
В 1932 году основной принцип радиолокации описал в своих работах научный сотрудник ЛЭФИ (Ленинградского электрофизического института) Павел Кондратьевич Ощепков. Им же в сотрудничестве с коллегами Б.К. Шембель и В.В. Цимбалиным летом 1934 года был продемонстрирован опытный образец радиолокационной установки, обнаружившей цель на высоте 150 м при удалении 600 м. Дальнейшие работы по совершенствованию средств радиолокации сводились к увеличению дальности их действия и повышению точности определения местоположения цели.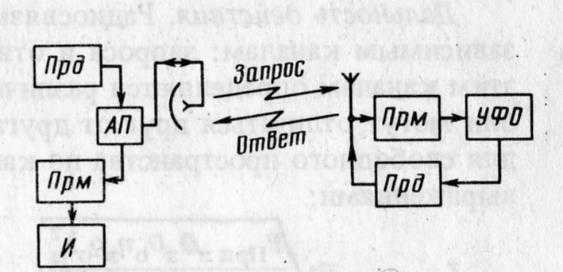
Виды радиолокации
Природа электромагнитного излучения цели позволяет говорить о нескольких видах радиолокации:
- Пассивная радиолокация исследует собственное излучение (тепловое, электромагнитное и т.п.), которое генерирует цели (ракеты, самолеты, космические объекты).
- Активная с активным ответом осуществляется в случае, если объект оборудован собственным передатчиком и взаимодействие с ним происходит по алгоритму «запрос — ответ».
- Активная с пассивным ответом предполагает исследование вторичного (отраженного) радиосигнала. Радиолокационная станция в этом случае состоит из передатчика и приемника.
- Полуактивная радиолокация — это частный случай активной, в случае когда приемник отраженного излучения расположен вне РЛС (например, является конструктивным элементом самонаводящейся ракеты).
Каждому виду свойственны свои достоинства и недостатки.
Методы и оборудование
Все средства радиолокации по используемому методу разделяют на РЛС непрерывного и импульсного излучения.
Первые содержат в своем составе передатчик и приемник излучения, действующие одновременно и непрерывно. По этому принципу были созданы первые радиолокационные устройства. Примером такой системы могут служить радиоальтиметр (авиационный прибор, определяющий удаление летательного аппарата от поверхности земли) или известный всем автолюбителям радар для определения скоростного режима транспортного средства.
При импульсном методе электромагнитная энергия излучается короткими импульсами в течение нескольких микросекунд. После генерации сигнала станция ведет работу только на прием. После улавливания и регистрации отраженных радиоволн РЛС передает новый импульс и циклы повторяются.
Режимы работы РЛС
Существует два основных режима функционирования радиолокационных станций и устройств. Первый — сканирование пространства. Он осуществляется по строго заданной системе. При последовательном обзоре перемещение луча радара может носить круговой, спиральный, конический, секторный характер. Например, решетка антенны может медленно поворачиваться по кругу (по азимуту), одновременно сканируя по углу места (наклоняясь вверх и вниз). При параллельном сканировании обзор осуществляется пучком радиолокационных лучей. Каждому соответствует свой приемник, ведется обработка сразу нескольких информационных потоков.
Режим слежения подразумевает постоянную направленность антенны на выбранный объект. Для ее поворота, согласно с траекторией движущейся цели, используются специальные автоматизированные следящие системы.
Алгоритм определения дальности и направления
Скорость распространения электромагнитных волн в атмосфере составляет 300 тыс. км/с. Поэтому, зная время, затраченное транслируемым сигналом на преодоление расстояния от станции до цели и обратно, легко вычислить удаленность объекта. Для этого необходимо точно зафиксировать время отправки импульса и момент принятия отраженного сигнала.
Для получения информации о местонахождении цели используется остронаправленная радиолокация. Определение азимута и элевации (угла места или возвышения) объекта производится антенной с узким лучом. Современные РЛС используют для этого фазированные антенные решетки (ФАР), способные задавать более узкий луч и отличающиеся высокой скоростью вращения. Как правило, процесс сканирования пространства совершается минимум двумя лучами.
Основные параметры систем
От тактических и технических характеристик оборудования во многом зависит эффективность и качество решаемых задач.
К тактическим показателям РЛС причисляют:
- Зону обзора, ограниченную минимальной и максимальной дальностью обнаружения цели, допустимым азимутальным углом и углом возвышения.
- Разрешающую способность по дальности, азимуту, элевации и скорости (возможность определять параметры рядом расположенных целей).
- Точность измерений, которая измеряется наличием грубых, систематических или случайных ошибок.
- Помехозащищенность и надежность.
- Степень автоматизации извлечения и обработки поступающего потока информационных данных.
Заданные тактические характеристики закладываются при проектировании устройств посредством определенных технических параметров, среди которых:
- несущая частота и модуляция генерируемых колебаний;
- диаграммы направленности антенн;
- мощность передающих и принимающих устройств;
- габаритные размеры и масса системы.

На боевом посту
Радиолокация — это универсальный инструмент, получивший широкое распространение в военной сфере, науке и народном хозяйстве. Области использования неуклонно расширяются благодаря развитию и совершенствованию технических средств и технологий измерений.
Применение радиолокации в военной отрасли позволяет решить важные задачи обзора и контроля пространства, обнаружения воздушных, наземных и водных мобильных целей. Без радаров невозможно представить оборудование, служащее для информационного обеспечения навигационных систем и систем управления орудийным огнем.
Военная радиолокация является базовой составляющей стратегической системы предупреждения о ракетном нападении и комплексной противоракетной обороны.
Радиоастрономия
Посланные с поверхности земли радиоволны также отражаются от объектов в ближнем и дальнем космосе, как и от околоземных целей. Многие космические объекты невозможно было полноценно исследовать лишь с использованием оптических инструментов, и только применение радиолокационных методов в астрономии позволило получить богатую информацию об их природе и структуре. Впервые пассивная радиолокация для исследования Луны была применена американскими и венгерскими астрономами в 1946 году. Примерно в то же время были случайно приняты и радиосигналы из космического пространства.
У современных радиотелескопов приемная антенна имеет форму большой вогнутой сферической чаши (подобно зеркалу оптического рефлектора). Чем больше ее диаметр, тем более слабый сигнал антенна сможет принять. Часто радиотелескопы работают комплексно, объединяя не только устройства, расположенные недалеко друг от друга, но и находящиеся на разных континентах. Среди важнейших задач современной радиоастрономии — изучение пульсаров и галактик с активными ядрами, исследование межзвездной среды.
Гражданское применение
В сельском и лесном хозяйстве радиолокационные устройства незаменимы при получении информации о распределении и плотности растительных массивов, изучении структуры, параметров и видов почв, своевременном обнаружении очагов возгораний. В географии и геологии радиолокация используется для выполнения топографических и геоморфологических работ, определения структуры и состава пород, поиска месторождений полезных ископаемых. В гидрологии и океанографии радиолокационными методами осуществляется контроль состояния главных водных артерий страны, снегового и ледяного покрова, картографирование береговой линии.
Радиолокация — это незаменимый помощник метеорологов. РЛС легко выяснит состояние атмосферы на удалении десятков километров, а по анализу полученных данных составляется прогноз изменения погодных условий в той или иной местности.
Перспективы развития
Для современной радиолокационной станции главным оценочным критерием выступает соотношение эффективности и качества. Под эффективностью понимаются обобщенные тактико-технические характеристики оборудования. Создание совершенной РЛС — сложная инженерная и научно-техническая задача, осуществление которой возможно только с использованием новейших достижений электромеханики и электроники, информатики и вычислительной техники, энергетики.
По прогнозам специалистов, в ближайшем будущем главными функциональными узлами станций самого разного уровня сложности и назначения будут твердотельные активные ФАР (фазированные антенные решетки), преобразующие аналоговые сигналы в цифровые. Развитие вычислительного комплекса позволит полностью автоматизировать управление и основные функции РЛС, предоставив конечному потребителю всесторонний анализ полученной информации.
fb.ru
Радиолокационные станции: история и основные принципы работы

Современная война стремительна и быстротечна. Зачастую победителем в боевом столкновении выходит тот, кто первым сумеет обнаружить потенциальную угрозу и адекватно на нее среагировать. Уже более семидесяти лет для поиска противника на суше, море и в воздухе используется метод радиолокации, основанный на излучении радиоволн и регистрации их отражений от различных объектов. Устройства, посылающие и принимающие подобные сигналы, называются радиолокационными станциями (РЛС) или радарами.
Термин «радар» — это английская аббревиатура (radio detection and ranging), которая была запущена в оборот в 1941 году, но давно уже стала самостоятельным словом и вошла в большинство языков мира.
Изобретение радара – это, безусловно, знаковое событие. Современный мир трудно представить без радиолокационных станций. Их используют в авиации, в морских перевозках, с помощью РЛС предсказывается погода, выявляются нарушители правил дорожного движения, производится сканирование земной поверхности. Радиолокационные комплексы (РЛК) нашли свое применение в космической промышленности и в системах навигации.
Однако наиболее широкое применение радары нашли в военном деле. Следует сказать, что эта технология изначально создавалась для военных нужд и дошла до стадии практической реализации перед самым началом Второй мировой войны. Все крупнейшие страны-участницы этого конфликта активно (и не без результата) использовали радиолокационные станции для разведки и обнаружения судов и самолетов противника. Можно уверенно утверждать, что применение радаров решило исход нескольких знаковых сражений как в Европе, так и на Тихоокеанском театре боевых действий.
Сегодня РЛС используются для решения чрезвычайно широкого спектра военных задач, от отслеживания запуска межконтинентальных баллистических ракет до артиллерийской разведки. Каждый самолет, вертолет, военный корабль имеет собственный радиолокационный комплекс. Радары являются основой системы противовоздушной обороны. Новейший радиолокационный комплекс с фазированной антенной решеткой будет установлен на перспективный российский танк «Армата». Вообще же, многообразие современных радаров поражает. Это абсолютно разные устройства, которые отличаются размерами, характеристиками и назначением.

С уверенностью можно заявить, что сегодня Россия является одним из признанных мировых лидеров в области разработки и производства РЛС. Однако прежде чем говорить о тенденциях развития радиолокационных комплексов, следует сказать несколько слов о принципах работы радаров, а также об истории радиолокационных систем.
Как работает радиолокатор
Локацией называют способ (или процесс) определения месторасположения чего-либо. Соответственно, радиолокация – это метод обнаружения предмета или объекта в пространстве при помощи радиоволн, которые излучает и принимает устройство под название радиолокатор или РЛС.
Физический принцип работы первичного или пассивного радара довольно прост: он передает в пространство радиоволны, которые отражаются от окружающих предметов и возвращаются к нему в виде отраженных сигналов. Анализируя их, радар способен обнаружить объект в определенной точке пространства, а также показать его основные характеристики: скорость, высоту, размер. Любая РЛС – это сложное радиотехническое устройство, состоящее из многих компонентов.

В состав любого радара входит три основных элемента: передатчик сигнала, антенна и приёмник. Все радиолокационные станции можно разделить на две большие группы:
- импульсные;
- непрерывного действия.
Передатчик импульсной РЛС испускает электромагнитные волны в течение краткого промежутка времени (доли секунды), следующий сигнал посылается только после того, как первый импульс вернется обратно и попадет в приемник. Частота повторения импульса – одна из важнейших характеристик РЛС. Радиолокаторы низкой частоты посылают несколько сотен импульсов в минуту.
Антенна импульсного радара работает и на прием, и на передачу. После испускания сигнала передатчик отключается на время и включается приёмник. После его приема происходит обратный процесс.
Импульсные РЛС имеют как недостатки, так и преимущества. Они могут определять дальность сразу нескольких целей, подобный радар вполне может обходиться одной антенной, индикаторы подобных устройств отличаются простотой. Однако при этом сигнал, испускаемый подобным РЛС должен иметь довольно большую мощность. Также можно добавить, что все современные радары сопровождения выполнены по импульсной схеме.

В импульсных радиолокационных станциях в качестве источника сигнала обычно используют магнетроны, или лампы бегущей волны.
Антенна РЛС фокусирует электромагнитный сигнал и направляет его, улавливает отраженный импульс и передает его в приемник. Существуют радиолокаторы, в которых прием и передача сигнала производятся разными антеннами, причем они могут находиться друг от друга на значительном расстоянии. Антенна РЛС способна испускать электромагнитные волны по кругу или работать в определенном секторе. Луч радара может быть направлен по спирали или иметь форму конуса. Если нужно, РЛС может следить за движущейся целью, постоянно направляя на нее антенну с помощью специальных систем.
В функции приемника входит обработка полученной информации и передача ее на экран, с которого она считывается оператором.
Кроме импульсных РЛС, существуют и радары непрерывного действия, которые постоянно испускают электромагнитные волны. Такие радиолокационные станции в своей работе используют эффект Доплера. Он заключается в том, что частота электромагнитной волны, отраженной от объекта, который приближается к источнику сигнала, будет выше, чем от удаляющегося объекта. При этом частота испускаемого импульса остается неизменной. Радиолокаторы подобного типа не фиксируют неподвижные объекты, их приемник улавливает лишь волны с частотой выше или ниже испускаемой.
Типичным доплеровским радиолокатором является радар, который используют сотрудники дорожной полиции для определения скорости автомобилей.

Основной проблемой радаров непрерывного действия является невозможность с их помощью определять расстояние до объекта, зато при их работе не возникает помех от неподвижных предметов между РЛС и целью или за ней. Кроме того, доплеровские радары – это довольно простые устройства, которым для работы достаточно сигналов малой мощности. Также нужно отметить, что современные радиолокационные станции с непрерывным излучением имеют возможность определять расстояние до объекта. Для этого используется изменение частоты РЛС во время работы.
Одной из главных проблем в работе импульсных РЛС являются помехи, которые идут от неподвижных объектов — как правило, это земная поверхность, горы, холмы. При работе бортовых импульсных радаров самолетов все объекты, находящиеся ниже, «затеняются» сигналом, отраженным от земной поверхности. Если говорить о наземных или судовых радиолокационных комплексах, то для них эта проблема проявляется в обнаружении целей, летящих на малых высотах. Чтобы устранить подобные помехи используется все тот же эффект Доплера.
Кроме первичных РЛС, существуют и так называемые вторичные радиолокаторы, которые используются в авиации для опознания воздушных судов. В состав таких радиолокационных комплексов, кроме передатчика, антенны и приемного устройства, входит еще и самолетный ответчик. При облучении его электромагнитным сигналом ответчик выдает дополнительную информацию о высоте, маршруте, номере борта, его государственной принадлежности.

Также радиолокационные станции можно разделить по длине и частоте волны, на которой они работают. Например, для исследования поверхности Земли, а также для работы на значительных дистанциях используются волны 0,9—6 м (частота 50—330 МГц) и 0,3—1 м (частота 300—1000 МГц). Для управления воздушным движением применяется РЛС с длиной волны 7,5—15 см, а загоризонтные радары станций обнаружения ракетных пусков работают на волнах с длиной от 10 до 100 метров.
История радиолокации
Идея радиолокации возникла практически сразу после открытия радиоволн. В 1905 году сотрудник немецкой компании Siemens Кристиан Хюльсмейер создал устройство, которое с помощью радиоволн могло обнаружить крупные металлические объекты. Изобретатель предлагал устанавливать его на кораблях, чтобы они могли избегать столкновений в условиях плохой видимости. Однако судовые компании не заинтересовались новым прибором.
Проводились эксперименты с радиолокацией и в России. Еще в конце XIX века русский ученый Попов обнаружил, что металлические объекты препятствуют распространению радиоволн.
В начале 20-х годов американские инженеры Альберт Тейлор и Лeo Янг сумели с помощью радиоволн засечь проплывающее судно. Однако состояние радиотехнической промышленности того времени было таково, что создать промышленные образцы радиолокационных станций было затруднительно.
Первые радиолокационные станции, которые можно было использовать для решения практических задач, появились в Англии примерно в середине 30-х годов. Эти устройства были очень большими, устанавливать их можно было только на суше или на палубе больших кораблей. Только в 1937 году был создан прототип миниатюрной РЛС, которую можно было установить на самолет. К началу Второй мировой войны англичане имели развернутую цепь радиолокационных станций под названием Chain Home.
Занимались новым перспективным направлением и в Германии. Причем, нужно сказать, небезуспешно. Уже в 1935 году главнокомандующему германского флота Редеру был продемонстрирован действующий радиолокатор с электронно-лучевым дисплеем. Позже на его основе были созданы серийные образцы РЛС: Seetakt для военно-морских сил и Freya для ПВО. В 1940 году в немецкую армию стала поступать система радиолокационная управления огнем Würzburg.
Однако несмотря на очевидные достижения германских ученых и инженеров в области радиолокации, немецкая армия начала использовать радиолокаторы позже англичан. Гитлер и верхушка Рейха считали радары исключительно оборонительным оружием, которое не слишком нужно победоносной немецкой армии. Именно по этой причине к началу битвы за Британию у немцев было развернуто только восемь радиолокационных станции Freya, хотя по своим характеристикам они как минимум не уступали английским аналогам. В целом же можно сказать, что именно успешное использование радаров во многом определило исход битвы за Британию и последующее противостояние между Люфтваффе и ВВС союзников в небе Европы.
Позже немцы на основе системы Würzburg создали рубеж ПВО, который получил название «линии Каммхубера». Используя подразделения специального назначения, союзники сумели разгадать секреты работы немецких радаров, что позволило эффективно глушить их.

Несмотря на то, что англичане вступили в «радарную» гонку позже американцев и немцев, на финише они сумели обогнать их и подойти к началу Второй мировой войны с самой продвинутой системой радиолокационного обнаружения самолетов.
Уже в сентябре 1935 года англичане приступили к постройке сети радиолокационных станций, в состав которой перед войной уже входили двадцать РЛС. Она полностью перекрывала подлет к Британским островам со стороны европейского побережья. Летом 1940 года британскими инженерами был создан резонансный магнетрон, позже ставший основой бортовых радиолокационных станций, устанавливаемых на американских и британских самолетах.
Работы в области военной радиолокации велись и в Советском Союзе. Первые успешные эксперименты по обнаружению самолетов с помощью радиолокационных станций в СССР были проведены еще в середине 30-х годов. В 1939 году на вооружение РККА была принята первая РЛС РУС-1, а в 1940 году – РУС-2. Обе эти станции были запущены в серийное производство.
Вторая мировая война наглядно показала высокую эффективность использования радиолокационных станций. Поэтому после ее окончания разработка новых РЛС стала одним из приоритетных направлений развития военной техники. Бортовые радиолокаторы со временем получили все без исключения военные самолеты и корабли, РЛС стали основой для систем противовоздушной обороны.
В период Холодной войны у США и СССР появилось новое разрушительное оружие – межконтинентальные баллистические ракеты. Обнаружение запуска этих ракет стало вопросом жизни и смерти. Советский ученый Николай Кабанов предложил идею использования коротких радиоволн для обнаружения самолетов противника на больших расстояниях (до 3 тыс. км). Она была довольно проста: Кабанов выяснил, что радиоволны длиной 10-100 метров способны отражаться от ионосферы, и облучая цели на поверхности земли, возвращаться тем же путем к РЛС.

Позже на основе этой идеи были разработаны радиолокаторы загоризонтного обнаружения запуска баллистических ракет. Примером таких РЛС может служить «Дарьял» — радиолокационная станция, которая несколько десятилетий была основой советской системы предупреждения о ракетных пусках.
В настоящее время одним из самых перспективных направлений развития радиолокационной техники считается создание РЛС с фазированной антенной решеткой (ФАР). Подобные радары имеют не один, а сотни излучателей радиоволн, работой которых руководит мощный компьютер. Радиоволны, испускаемые разными источниками в ФАР, могут усиливать друг друга, если они совпадают по фазе, или же, наоборот, ослаблять.
Сигналу РЛС с фазированной решеткой можно придавать любую необходимую форму, его можно перемещать в пространстве без изменения положения самой антенны, работать с разными частотами излучения. РЛС с фазированной решеткой гораздо надежней и чувствительней, чем радиолокатор с обычной антенной. Однако у подобных радаров есть и недостатки: большой проблемой является охлаждение РЛС с ФАР, кроме того, они сложны в производстве и дорого стоят.

Новые радиолокационные станции с фазированной решеткой устанавливаются на истребители пятого поколения. Эта технология используется в американской системе раннего предупреждения о ракетном нападении. Радиолокационный комплекс с ФАР будет установлен на новейший российский танк «Армата». Следует отметить, что Россия является одним из мировых лидеров в разработке радиолокаторов с ФАР.
militaryarms.ru
Радиолокационная система
Предлагаемая радиолокационная система предназначена для использования в качестве береговых, аэродромных и корабельных РЛС для обзора земной и водной поверхности и обнаружения на ней объектов, в том числе и малоразмерных. Технический результат заключается в получении высокого углового разрешения в азимутальной плоскости. Поставленная задача достигается тем, что установленной на подвижное основание антенне придается движение в горизонтальной плоскости, при этом ее электрическая ось устанавливается перпендикулярно или под углом к направлению движения. При движении антенны проводится когерентное суммирование отраженных сигналов в каждом элементе дальности. В результате когерентного суммирования создается искусственный (синтезированный) раскрыв антенны, существенно превышающий раскрыв реальной антенны, обеспечивающий высокое угловое разрешение. Возможность когерентного суммирования принятых сигналов обеспечивается путем компенсации фазовых изменений принимаемого сигнала. 5 ил.
Изобретение относится к области радиолокации и предназначено для использования в береговых, аэродромных и корабельных радиолокационных станциях для обнаружения наземных и надводных объектов, Известны радиолокационные станции — береговые, корабельные или аэродромные РЛС, предназначенные для обзора земной и водной поверхности и обнаружения расположенных на ней объектов, осуществляющие обзор путем секторного качания луча антенны в азимутальной плоскости. Зона обзора такой РЛС представляет собой сектор с радиусом, соответствующим дальности действия РЛС. Однако их применение для обнаружения отраженных сигналов от малоразмерных целей (ц<5M) в условиях отражений от подстилающей поверхности оказывается не эффективным. Ниже приводится доказательство этого утверждения. Основной характеристикой, определяющей возможность применения РЛС для обнаружения или распознавания наземной и морской цели на фоне подстилающей поверхности, является разрешающая способность. Обобщенной характеристикой разрешающей способности может служить площадь разрешаемого элемента на местности, в пределах которого цели или элементы не разрешаются. При этом диаграмма направленности антенны по азимуту определяет линейную разрешающую способность по азимуту dL. А ширина спектра зондирующего сигнала определяет линейную разрешающую способность по дальности dz. При обнаружении наземных и морских объектов на фоне подстилающей поверхности характеристики обнаружения зависят от соотношения сигнал/шум+фон где P с — отраженная мощность сигнала от объекта; Pф — мощность собственных шумов приемного канала; Pa — мощность отражений от подстилающей поверхность. При низком уровне собственных шумов приемника по сравнению с фоновой составляющей сигнала Pш<P отношение сигнал/шум+фон будет определяться где ц — эффективная площадь отражений от объекта, ф — эффективная площадь отражений подстилающей поверхности, Учитывая, что эффективная площадь отражений подстилающей поверхности определяется РИСУНКИ
где o — удельное ЭПР подстилающей поверхности, поэтому и характеристики обнаружения объектов на фоне подступающей поверхности будут существенно зависеть от разрешающей способности РЛС. Из формул 1 и 1а следует, что даже при малом коэффициенте отражений o обнаружение малоразмерных объектов на фоне моря может обеспечиваться только при очень высокой разрешающей способности. Так для обнаружения объекта (лодка в море) с ц= 2 м2 на фоне моря 3-4 балла (o= 510-3) с вероятностью правильного обнаружения Pпо= 0,7, при вероятности ложной тревоги Pлт=10-6, разрешаемый элемент поверхности не должен превышать 6,6 м2, что соответствует линейному разрешению по азимуту и дальности 2,5 метра. Для получения такого линейного разрешения по азимуту на дальности D=5 км диаграмма направленности антенной системы в азимутальной плоскости не должна превышать
Для обеспечения такого углового разрешения размер антенны D в азимутальной плоскости при длине волны = 8 мм должен быть
что существенно превышает размер антенного раскрыва. Вышеизложенное показывает, что существующие наземные и корабельные РЛС не способны обнаруживать отраженные сигналы от малоразмерных целей в условиях отражения от подстилающей поверхности даже средней интенсивности. Для улучшения характеристик обнаружение целей разработки таких РЛС в последние годы велись в направлении увеличения апертуры антенны и применения длины волны в миллиметровом диапазоне волн, однако как показано выше, для выполнения условий обнаружения малоразмерных целей требуется применение антенны с размером раскрыва, практически не реализуемым. В настоящее время для обзора российских морских границ используются РЛС, подобные применяющимся на морских кораблях. Поэтому в качестве аналога таких РЛС можно привести речную навигационную станцию KCLVINHUQHES, R, SR 1000 и электрон-Сперри МК-3217р, предназначенную для обеспечения безопасности плавания по рекам и другим водоемах, состоящую из антенны, передатчика, приемника, индикатора и блока питания. Эти станции имеют круговой обзор по азимуту. Отличительной особенностью является большой раскрыв рупорной антенны L = 2,1 — 2,4 метра при ширине диаграммы направленности в азимуте 0,95 — 1
1. Антенна (Прибор А). 2. Передатчик (Прибор П). 3. Приемник (Прибор П). 4. Синхронизатор (Прибор И). 5. Индикатор (Прибор И). Радиолокационная станция » Дон» имеет традиционное .построение импульсной станции с магнетронным передатчиком, работающим на длине излучаемой волны 3,2 см. РЛС работает с частотой повторения (Fn 1600-3200) Гц, определяющей однозначную дальность. Высокая разрешающая способность по дальности обеспечивается излучением коротких импульсов ц= (0,1 — 1) мксек. Учитывая направленность предложенного изобретения рассмотрим получение в прототипе разрешения в азимутальной плоскости. Относительно высокая разрешающая способность в азимутальной плоскости ( = 1,1o) в прототипе обеспечивается также традиционным способом т. е. за счет большого размера реальной апертуры антенны (L = 1,8 м). При этом основание антенны устанавливается неподвижно, а для обеспечения необходимой зоны обзора в азимутальной плоскости антенна вращается с определенной скоростью вокруг оси в центре ее основания. Как следует из вышеизложенного, приведенные аналоги и прототип, несмотря на большие размеры антенной системы, не обеспечивают требуемой угловой разрешающей способности для обнаружения малоразмерных объектов (
Роль апертуры антенны в этом случае играет длина траектории движения антенны РЛС. Время когерентной обработки Тс определяется скоростью движения антенны и длиной траектории. На фиг. 2 представлено в координатах Х-У движение антенной системы. В данном примере антенна движется по координате Х. Если ограничиться квадратичным членом разложения в ряд Тейлора, текущее расстояние будет
Фаза траекторного сигнала при такой аппроксимации изменяется по закону
Доплеровская частота траекторного сигнала
Второй член определяет ширину спектра fд доплеровских частот траекторного сигнала. Средняя частота сигнала равна нулю, когда антенна движется перпендикулярно линии визирования на объект. Максимальное время накопления сигнала t=T сmax обеспечивается тогда, когда вся диаграмма направленности антенны при своем движении проходит объект обнаружения т.е.
В этом случае ширина спектра доплеровских частот траекторного сигнала будет
где dа — размер реальной антенны. Однако в предлагаемом изобретении при синтезировании апертуры из-за ограничений реального размера участка движения антенны может быть использована только часть траекторного сигнала. Время синтезирования Tс выбирается исходя из требуемой угловой разрешающей способности по азимуту
При этом ширина спектра доплеровских частот обрабатываемой части траекторного сигнала будет составлять
Из формулы 5 следует, что угловая разрешающая способность соответствует
При движении антенны перпендикулярно линии визирования на объект разрешающая способность будет
для реализации когерентного накопления необходимо при движении компенсировать изменения фазы траекторного сигнала в зависимости от скорости угла и дальности, обеспечивая когерентность при накоплении. Получение высокого азимутального разрешения в предлагаемой радиолокационной системе обеспечивается с помощью следующей процедуры обработки. Излученный движущейся антенной импульсный зондирующий сигнал отражается от объектов и поверхности и с некоторой задержкой (определяемой расстоянием) принимается этой же антенной и поступает на вход приемника. После преобразования на промежуточную частоту радиосигнал поступает на два синхронных фазовых детектора, опорные сигналы которых сдвинуты относительно друг друга на /2. С выхода фазовых детекторов поступают мнимая и действительная составляющие комплексной огибающей сигнала. Так как обработку сигнала производят цифровым процессором с помощью аналого-цифрового преобразователя, огибающую сигнала стробируют по времени (дальности) и амплитуду преобразовывают в цифровой вид. Обработка сигнала проводится методом гармонического спектрального анализа. В этом случае сигналы радиолокационного изображения одной стробированной полоски дальности на выходе системы обработки в аналоговой форме могут быть описаны
где Sвх(i) — комплексный сигнал на входе системы обработки, отраженный от объекта, расположенного под углом i относительно линии визирования объекта
— текущее время на интервале накопления на интервале движения антенны
A(,i) — амплитуда сигнала;
(i;i) — фаза сигнала;
h() — опорная функция, комплексно сопряженная сигналом, отраженным от объекта;
H() — весовая функция, определяющая заданный уровень боковых лепестков;
Uar — составляющая скорость движения антенны в направлении на объект Var= VaCosi;
Aar — составляющая ускорения движения антенны в направлении на объект
— длина излучаемой волны
Для представления этих зависимостей при цифровой обработке сигнала следует произвести переход к дискретной форме. При этом производится замена на КТ, на 2l/NT, а интегрирование заменяется суммированием по К,
где К — номер отсчета входных сигналов и опорной функции на интервале накопления. l — номер отсчета выходного сигнала (спектра)
Т — период дискретизации входных сигналов и опорной функции
N — количество отсчетов на интервале накопления. N = TH/T
С учетом этих изменений сигнал радиолокационного изображения на выходе цифровой системы обработки будет
B соответствии с вышеизложенным признаки и преимущества предлагаемой paдиoлoкaциoнной системы приводятся ниже в описании предложенного варианта предполагаемого изобретения. На фиг. 1-5 представлены чертежи, поясняющие описание предложенной РЛС. На фиг. 1 приведена блок-схема традиционной радиолокационной системы прототипа. На фиг. 2 приведен чертеж, поясняющий наличие доплеровских и фазовых изменений при движении антенны, дающих возможность синтезировать апертуру антенны. На фиг. 3 представлена блок-схема предложенной РЛС, отвечающая формуле изобретения. На фиг. 4 на двух листах (фиг. 4-1 и фиг. 4-2) представлена развернутая блок-схема предложенной на фиг. 3 РЛС, в которой подробно изложен процесс формирования и обработки сигналов в каждом из блоков и в РЛС в целом. Соединение связей между листами обозначены буквами от n до l. На фиг. 5 приведен чертеж возможного варианта реализации движения антенны по направляющим. На фиг. 3 представлена блок-схема предлагаемой радиолокационной системы, где:
— блок 1 — антенна
— блок 2 — передатчик
— блок 3 — приемник
— блок 4 — синтезатор частот
— блок 5 — индикатор
— блок 6 — циркулятор
— блок 7 — датчик углов
— блок 8 — измеритель скорости
— блок 9 — процессор сигналов
— блок 10 — процессор данных
— блок 11 — задающий генератор
В предложенной РЛС антенна установлена на подвижное основание и антенне задается поступательно-возвратное движение по направляющим, в горизонтальной плоскости, при этом ее электрическая ось установлена перпендикулярно (или под углом) к направлению движения. Конфигурация траектории движения антенны может быть различной (в том числе и круговой). Однако для простоты обработки сигналов предпочтительной является конфигурация траектории движения, при которой обеспечивается наибольшая длина линейного участка. На фиг. 5 представлен вариант движения антенны по направляющим и размещение антенны на подвижном основании. Движение основания по направляющим осуществляется с помощью двигателя. Конструкция антенны, подвижное основание, построение направляющих определяется конкретными требованиями и условиями применения РЛС. Выполнение такой конструкции проводится традиционными инженерными методами с применением известных материалов и конструкций, в том числе и стандартных. На фиг. 4(1-2) представлена развернутая структурная схема радиолокационной системы в соответствии с настоящим предложением (фиг. 3). В радиолокационную систему входит:
антенна — 1
передатчик — 2
приемник — 3
синтезатор частот — 4
индикатор — 5
циркулятор — 6
датчик углов — 7
измеритель скорости — 8
процессор сигналов — 9
процессор данных -10
задающий генератор — 11
усилитель мощности — 12
модулятор — 13
СВЧ-приемник — 14
усилитель промежуточной частоты — 15
фазовый детектор -16
фазовый детектор -17
АЦП — 18
АЦП — 19
память — 20
память — 21
умножитель — 22
умножитель — 23
умножитель — 24
умножитель — 25
узел разности — 26
узел суммы — 27
процессор БПФ — 28
вычислитель — 29
узел модуля Cos — 30
умножитель — 31
умножитель — 32
умножитель — 33
умножитель — 34
умножитель — 35
узел суммы — 36
узел суммы — 37
узел Sin — 38
узел Cos — 39
память — 40
память — 41
умножитель — 42
умножитель — 43
умножитель — 44
узел Sin2i — 45
задатчик данных — 46
РЛС работает следующим образом:
В процессе движения антенны (1) усилитель мощности (12) усиливает поступающие на него из модулятора (13) высокочастотные импульсы и через циркулятор (6) передает в антенну (1). Антенной (1) эти импульсы излучаются в пространство и распространяются в направлении выбранной области. Когерентность сигнала определяется задающим генератором (11). Модулятор (13) осуществляет модуляцию высокочастотного, сигнала f и формирует импульсы, подаваемые в усилитель мощности, имеющие заданную длительность () и период повторения (Тп), определяемый однозначной дальностью. Высокочастотный сигнал (f) формируется синтезатором частоты (4), разработанным известными методами проектирования и изготовленным с использованием известной элементной базы. От задающего кварцевого генератора (II) сигнал с входной частотой fr поступает в синтезатор частот (4), умножается до более высокой частоты f и используется в качестве несущей частоты радиолокационного сигнала, излучаемого антенной. Также в процессе движения, отраженные сигналы от объектов и поверхности принимаются антенной и через циркулятор (6) поступают в СВЧ-приемник (14). В СВЧ-приемнике (14) эти сигналы в смесителе приемника смешиваются с сигналом синтезатора fс, в результате чего образуются сигналы промежуточной частоты fоп. Сигналы промежуточной частоты в усилителе промежуточной частоты УПЧ (15) усиливаются и поступают на фазовые детекторы (16) и (17), на которые от синтезатора поступает сигнал с частотой fпр, равной промежуточной частоте fпр. Причем, на один из фазовых детекторов сигнал синтезатора fпр поступает со сдвигом на /2. За счет движения антенны (1) на выходах фазовых детекторов образуются синфазный «1» и квадратурный «Q» сигналы доплеровской частоты. Далее, оба сигнала «1» и «Q»с помощью аналого-цифрового преобразователя (18) и (19), управляемого с помощью синхросигнала fc’a, преобразуются в цифровую форму. С выходов АЦП (18) и (19) массив сигналов двух квадратур, поступающих в процессор (9), синхронизируемый сигналом fсп из блока 4 накапливается в памяти (20) и (21) для каждого элемента дальности и каждого периода повторения. Одновременно в процессе движения антенны, для компенсации фазовых изменений, в процессоре данных (10) синхронизируемым сигналом fп, из блока (4), формируется опорная функция, комплексно сопряженная с сигналом, отраженным от объекта, в соответствии с формулой [7]. Для этого формируется линейный член изменения фазы л опорной функции и ее квадратичный член кв.
Для формирования линейного члена с датчика угла (7) на узел cos поступает значение угла i и с него поступает на умножитель (31). На этот же умножитель (31) с измерителя скорости поступает значение скорости Ua. Произведение Vacosi поступает на умножитель (32), где умножается на величину a = 4и/, поступающую из задатчика данных (46). Произведение (4и/)VaCos поступает на умножитель (34), где умножается на номер элемента дальности , поступающего из задатчика данных (46). В результате на выходе умножителя (34) формируется конкретное изменение фазы для каждого элемента дальности в периоде повторения Tп— (4и/)VaCosi
В умножителе (33) и (35) формируется изменение фазы от периода к периоду «Тп» для всех элементов дальности. Для этого из умножителя (31) значение VaCosi последовательно в умножителях (33) и (35) умножается сначала на коэффициент b = (4/)Tп, а затем на коэффициент «К», равный номеру периода «Тп«, в результате чего на выходе умножителя (35) будет (4kTп/)VaCos.
В узле суммы (36) формируется линейный член изменения фазы
для каждого элемента дальности для «К» — ого периода повторения.
Для формирования квадратичного изменения фазы кв опорной функции используются умножители (42), (43), (44), a также узел Sin2i. B умножителе (42) значение скорости Va с измерителя скорости (8) вначале умножается само на себя, а затем умножается на (КТn)2, поступающий из задатчика данных, (46) затем величина Va2(КТn)2 поступает на умножитель (43), куда поступают коэффициент C = 2/ и коэффициент 1/R из задатчика данных (46). Затем эта величина поступает в умножитель (44), где умножается на значение Sin2 , поступающее из узла Sin2i(45).
С выхода умножителя (44) квадратичный член изменения фазы
поступает на узел суммы, где суммируется с линейным членом каждого элемента дальности в каждом периоде Tп. С выхода узла суммы изменение фазы опорной функции = +кв для каждого элемента дальности в каждом периоде повторения Tп поступают в узлы Sin и Cos и накапливаются в памяти для каждого элемента дальности и каждого периода повторения. По окончании движения антенны по траектории поступающие из памяти 20, 21 отсчеты сигнала каждого элемента дальности каждого периода в умножителях 22, 23, 24 и 25 перемножаются с отсчетами для каждого элемента дальности и периода повторения опорной функции, поступающими из памяти (40) и (41). С выходов узлов разности (26) и суммы (27) сигналы двух квадратур подаются в процессор БПФ, где подвергаются гармоническому анализу по алгоритму быстрого преобразования Фурье. Результатом преобразования сигналов из временной области в частотную являются азимутальные отсчеты двух квадратур радиолокационной информации в каждом элементе дальности. Затем отсчеты двух квадратур поступают на узел 29, где из них формируется модуль. Далее сигналы поступают в систему индикации 5. Техническая эффективность
Технический эффект предлагаемого изобретения заключается в повышении углового азимутального разрешения радиолокационной системы. В зависимости от реализуемого размера траектории движения антенны повышение углового разрешения предполагаемой РЛС по сравнению с прототипом будет
где d, — угловое разрешение РЛС,
L — линейный размер,
Kобуж — коэффициент обужения реальной диаграммы. В зависимости от условий применения коэффициент Kобуж может быть более 10.
Формула изобретения
www.findpatent.ru
Радиолокационная станция: как развивалась новая система безопасности в России
Современные войны отличаются своей стремительностью и быстротечностью. Нередко победителями в боевых столкновениях выходят те, кто первыми смог обнаружить потенциальные угрозы и соответственно на них реагировал. Уже восьмой десяток лет для разведки и распознавания неприятеля на море и на суше, а также в воздушном пространстве используются радиолокационные методы.

Они основаны на излучении радиоволн с регистрацией их отражений от самых разнообразных объектов. Установки, которые посылают и принимают такие сигналы – современные радиолокационные станции или радары. Понятие «радар» происходит от английской аббревиатуры – RADAR. Оно появилось в 1941 году и давно вошло в языки мира.
Появление радаров стало знаковым событием. В современном мире практически не обойтись без радиолокационных станций. Без них не обходится авиация, мореплавание, гидрометцентр, ДПС, и пр. Более того радиолокационный комплекс широко используется в космических технологиях и в навигационных комплексах.
РЛС на военной службе
Все же больше всего радары приглянулись военным. Тем более, что эти технологии первоначально создавались для военного применения и практически реализовались перед Второй мировой войной. Все крупнейшие государства активно применяли РЛС для выявления кораблей и самолетов неприятеля. Причем их использование решало исход многих битв.
На сегодняшний день новые радиолокационные станции применяются в весьма широком спектре военных задач. Это и слежение за межконтинентальными баллистическими ракетами и артиллерийская разведка. Все самолеты, вертолеты, военные корабли обладают своими РЛС. Радары – это вообще основа систем ПВО.

Как работают радиолокаторы
Локация – это определение местопребывания чего-нибудь. Таким образом, радиолокация – это обнаружение предметов или объектов в пространстве с помощью радиоволн, которые излучаются и принимаются радиолокатором или РЛС. Принцип действия первичных или пассивных радаров основан на передаче в пространство радиоволн, отражаемых от объектов и возвращаемых к ним в виде отраженных сигналов. После их анализа, радары обнаруживают объекты в определенных точках пространства, их основные характеристики в виде скорости, высоты и размера. Все радары являются сложными радиотехническими устройствами из множества элементов.
Современный радиолокационный комплекс
Любые радары состоят из трех основных элементов:
- Передатчиков сигналов;
- Антенн;
- Приемников.
Из всех радиолокационных станций имеется особенное подразделение по двум большим группам:
- Импульсные;
- Непрерывного действия.
Передатчики импульсных РЛС излучают электромагнитные волны на протяжении коротких промежутков времени (долей секунд). Следующие сигналы посылаются лишь тогда, как первые импульсы вернутся назад и попадут в приемники. Частоты повторения импульсов являются также важнейшими характеристиками. Так низкочастотными радиолокаторами посылается не одна сотня импульсов в течение минуты.
Антенны импульсных радаров работают как приемники-передатчики. Как только ушли сигналы, передатчики отключаются на время и включаются приемники. Вслед за их приемом происходят обратные процессы.

Импульсные радары обладают своими недостатками и преимуществами. Они могут определять дальности одновременно нескольких целей. Такие радары могут иметь по одной антенне, а их индикаторы весьма простые.
Однако излучаемые сигналы должны обладать большой мощностью. Импульсная схема имеется у всех современных радаров сопровождения. Импульсные радиолокационные станции в качестве источников сигналов обычно пользуются магнетронами или лампами бегущих волн.
Импульсные радарные системы
Антенны радаров фокусируют электромагнитные сигналы и направляют их, а также улавливают отраженные импульсы и передают его в приемники. В некоторых радиолокаторах прием-передача сигналов могут производиться с помощью разных антенн, находящихся одна от другой на больших расстояниях. Антенны радаров могут производить излучение электромагнитных волн по кругу или действовать в определенных секторах.
Лучи радаров могут быть направлены спирально или обладать формами конусов. При необходимости радары могут отслеживать движущиеся цели, и все время направлять на них антенны, используя специальные системы. Приемники занимаются обработкой полученных данных и передачей их на экраны операторов.

Одним из основных недостатков в работе импульсных радаров являются помехи, идущие от недвижимых объектов, от земной поверхности, гор, холмов. Так, бортовые импульсные радары в процессе их функционирования в самолетах будут принимать затенения от сигналов, отраженных земной поверхностью. Наземные или судовые радиолокационные комплексы выявляют эти проблемы в процессе обнаружения целей, которые летят на малых высотах. Для устранения таких помех пользуются эффектом Доплера.
Радары непрерывного действия
Радары непрерывного действия функционируют постоянным излучением электромагнитных волн и пользуются эффектом Доплера. Его принцип в том, что частоты электромагнитных волн, отраженные от объектов, приближающихся к источникам сигналов, будут выше, чем от удаляющихся объектов. При этом частоты излучаемых импульсов остаются неизменными. Такими радиолокаторами не фиксируются неподвижные объекты, их приемники улавливают только волны с частотами выше или ниже излучаемых.
Главный недостаток радаров непрерывного действия – это их неспособность определять расстояния до объектов. Однако при их работе не возникают помехи от неподвижных объектов между радарами и целями, либо за ними. Также у доплеровских радаров сравнительно простое устройство, которому для функционирования хватит и сигналов с малой мощностью. Кроме того, современные радиолокационные станции непрерывного излучения обладают возможностью определять расстояния до объектов. Для этого применяются изменения частот радаров в процессе их действия.
Известно еще и о так называемых вторичных радиолокаторах, используемых в авиации для опознавания самолетов. В таких радиолокационных комплексах имеются еще и самолетные ответчики. В ходе облучения воздушных судов электромагнитными сигналами ответчики выдают дополнительные данные, такие как высота, маршрут, номер борта, а также государственная принадлежность.
Разновидности радиолокационных станций
Радары могут разделяться длиной и частотой волн, на которых они действуют. В частности, когда исследуется земная поверхность и при работе на больших расстояниях, используются волны 0,9—6 м и 0,3—1 м. В управлении воздушного движения используются радары с длиной волн 7,5—15 см, а в загоризонтных радарах на станциях по обнаружению запусков ракет применяются 10-100-метровые волны.
Из истории развития радиолокации
Замысел об использовании радиолокации возник следом за открытием радиоволн. Так, в 1905 году сотрудником компании Siemens Кристианом Хюльсмейером был создан прибор, который при помощи радиоволн мог обнаруживать наличие крупных металлических объектов. Изобретателем было предложено устанавливать такие приборы на судах во избежание столкновений, например, при туманах. Тем не менее, в судовых компаниях не была выражена заинтересованность в новом приборе.
Были проведены радиолокационные исследования и на территории России. Так, еще в конце XIX столетия русским ученым Поповым было обнаружено то, что наличие металлических объектов препятствует распространению радиоволн.
В начале двадцатых годов американскими инженерами Альбертом Тейлором и Лeo Янгом при помощи радиоволн был обнаружен проплывающий корабль. Тем не менее, из-за того, что радиотехническая промышленность той поры была неразвитой, создавать радиолокационные станции в промышленных масштабах не представлялось возможным.
К производству первых радиолокационных станций, с помощью которых решались бы практические задачи, приступили в Англии в 30-х годах. Эта аппаратура была чрезвычайно громоздкой и могла устанавливаться либо на земле, либо на больших кораблях. Лишь в 1937 году создали первый миниатюрный радар, который можно было бы устанавливать на самолетах. В результате, перед Второй мировой войной у англичан имелась развернутая сеть с радиолокационными станциями именуемая Chain Home.
Радары периода Холодной войны
Во времена Холодной войны в Соединенных Штатах и в Советском Союзе появилась новая разновидность разрушительного оружия. Конечно же, это было появление межконтинентальных баллистических ракет. Своевременное выявление пусков таких ракет было животрепещущим.
Советский ученый Николай Кабанов предложил идею использовать короткие радиоволны для выявления воздушных судов противника на значительных дистанциях (до 3000 км). Все было достаточно просто. Ученый смог обнаружить, что 10-100-метровые радиоволны имеют расположенность к отражению от ионосферы.

Таким образом, при облучении целей на земной поверхности, они возвращаются также обратно к радарам. Позднее, основываясь на этой идее, ученые смогли разработать радары с загоризонтным обнаружением пуска баллистических ракет. Образцом таких установок может быть «Дарьял» — радиолокационная станция. Она целые десятилетия была в основе советских систем по предупреждению запусков ракет.
На сегодняшний день самым перспективным направлением в развитии радиолокационных систем принято считать создание радиолокационных станций с фазированными антенными решетками (ФАР). Такие устройства обладают не одним, а сотнями излучателей радиоволн. Всем их функционированием руководят мощные компьютеры. Излучаемые с помощью разных источников в ФАР радиоволны могут усиливаться одна другой, или наоборот, когда они будут совпадать по фазе либо ослабляться.
Сигналам радиолокационных станций с фазированными решетками могут придаваться любые необходимые формы. Они могут перемещаться в пространстве при отсутствии изменений в положениях самих антенн, а также функционировать на разных частотах излучения. Радары с фазированными решетками считаются надежнее и чувствительнее, чем такие же устройства с обычными антеннами.
Тем не менее, подобные радары обладают и недостатками. Самыми большими проблемами в радиолокационных станциях с ФАР являются их системы охлаждения. Более того, такие радарные установки отличаются чрезвычайной сложностью в процессе производства, а также весьма дорогостоящие.

Комплексы радаров с ФАР
О новых радиолокационных станциях с фазированными решетками известно то, что они уже сейчас устанавливаются на истребителях пятого поколения. Такие технологии используются в американских системах с ранним предупреждением о ракетных нападениях. Радиолокационные комплексы с ФАР предполагается устанавливать на «Арматах» — новейших танках российского производства. Многие эксперты отмечают, что РФ входит в число мировых лидеров, успешно разрабатывающих радиолокационные станции с ФАР.
warways.ru
Основы построения и принципы систем радиолокации
Содержание
1.Общие сведения о системах радиолокации
2. Классификация систем радиолокации
3. Сигналы и цели в радиолокации
4. Методы измерения координат целей
5. Радиолокационные станции следящего типа
6. Фазовый детектор
7. Смеситель
8.Особенности развития и примеры современных РЛС
Список литературы
Назначение и область применения.
Радиолокацией называется совокупность методов и технических средств, предназначенных для обнаружения различных объектов в пространстве, измерения их координат и параметров движения посредством приема и анализа электромагнитных волн, излучаемых или переизлучаемых объектами.
Радиолокация как научно-техническое направление в радиотехнике зародилась в 30-х годах. Достижения авиационной техники обусловили необходимость разработки новых средств обнаружения самолетов, обладающих высокими характеристиками (дальностью, точностью). Такими средствами оказались радиолокационные системы.
Выдающийся вклад в развитие радиолокации внесли советские ученые и инженеры П. К. Ощепков, М. М. Лобанов, Ю. К. Коровин, Б. К. Шембель. В Советском Союзе первые успешные эксперименты обнаружения самолетов с помощью радиолокационных устройств были проведены еще в 1934/36 гг. В 1939 г. на вооружении войск ПВО поступили первые серийные отечественные радиолокаторы. Существенным шагом в развитии радиолокации было создание в 1940/41 гг. под руководством Ю. Б. Кобзарева импульсного радиолокатора. В настоящее время радиолокация одна из наиболее прогрессирующих областей радиотехники.
Получение информации в радиолокации сопряжено с наблюдением некоторой области пространства. Технические средства, с помощью которых ведется радиолокационное наблюдение, называются радиолокационными станциями (РЛС) или радиолокаторами; а наблюдаемые объекты — радиолокационными целями. Типичными целями являются самолеты, ракеты, корабли, наземные инженерные сооружения и т. п.
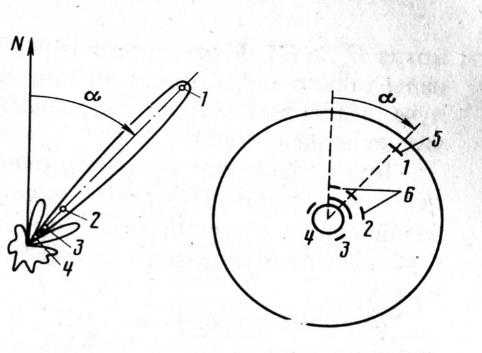
В радиолокации наиболее часто измеряются дальность между целью и РЛС, угловые координаты (азимут, угол места) и радиальная, относительно радиолокатора, составляющая скорости движения. (Азимут — это угол между направлением на цель и северным направлением, измеренный в горизонтальной плоскости. Угол места измеряется между вектором наклонной дальности и его проекцией на горизонтальную плоскость.) В задачу радиолокационного наблюдения в некоторых случаях входит также идентификация (распознавание) целей.
Понятие «система радиолокации» объединяет РЛС и другие связанные с ними технические средства, операторов, наблюдаемые цели и пространство, в котором ведется наблюдение.
Системы радиолокации практически всегда входит в состав более сложных суперсистем. Эти суперсистемы имеют важное военное и народнохозяйственное значение и находят разнообразное применение: для управления воздушным движением, в навигации самолетов, кораблей, в геофизических и астрофизических исследованиях и др.
Системы радиолокации составляют информационную часть таких суперсистем и функционируют совместно и во взаимной связи с другими подсистемами суперсистемы (радионавигации, радиоуправления, передачи информации).
Методы радиолокации.
Носителем информации в радиолокации является радиолокационныйсигнал — электромагнитная волна, излучаемая целью. Это излучение может иметь различную природу; вторичное излучение (отражение), или собственное излучение радиоволн. В зависимости от способа образования радиолокационного сигнала различают активный, активный с активным «ответом” и пассивный методы радиолокации.
В активной радиолокации передатчик РЛС излучает в направлении на цель мощный зондирующий сигнал. При облучении цели электромагнитной волной часть энергии волны поглощается, а остальная — отражается. Приемник радиолокатора улавливает слабый отраженный сигнал. Обнаружение отраженного сигнала свидетельствует о наличии цели. Анализ принятого сигнала и сравнение его с излученным позволяет получить информацию о пространственном положении и движении цели относительно РЛС.
В активной радиолокации с активным ответом радиолокационный сигнал создается путем переизлучения зондирующего сигнала специальным радиоответчиком, установленным на цели. Системы, использующие такой метод, применяются для наблюдения самолетов, космических аппаратов, имеющих ретранслятор сигналов на борту.
Системы активной радиолокации могут быть совмещенными и разделенными. В первом случае приемная и передающая части РЛС совмещаются в едином устройстве; во втором — приемное и передающее устройства размещаются в различных точках пространства, на удалении друг от друга.
В пассивной радиолокации в качестве сигналов используется самопроизвольное электромагнитное излучение целей: собственное тепловое радиоизлучение физических тел или излучение радиотехнических устройств, установленных на цели. Пассивная РЛС имеет только приемное устройство, с помощью которого производится обнаружение целей и измерение их угловых координат.
На современном этапе развития техники часто оказывается затруднительным построение пассивных РЛС с высокими техническими характеристиками, использующими тепловое радиоизлучение, вследствие малой его интенсивности. Поэтому такие РЛС нашли ограниченное применение. Большое значение имеют специальные пассивные РЛС, предназначенные для радиоразведки.
2. Классификация систем радиолокации
В основу классификации систем радиолокации могут быть положены различные признаки. Для систем радиолокации, осуществляющих выделение, обработку и накопление информации о радиолокационных целях, наиболее существенными являются информационные признаки, а именно: назначение и характер получаемой информации. Однако для практики такая классификация часто оказывается недостаточной. Поэтому дополнительно вводят классификацию по способу формирования и обработки сигналов, по месту (объекту) размещения аппаратуры, по диапазону используемых радиоволн.
Элементом системы радиолокации, определяющим ее назначение, основные свойства, возможности практического использования, являются РЛС. В зависимости от назначения и характера получаемой информации можно выделить три класса РЛС.
1. РЛС обзорного типа. Назначение этих радиолокаторов— поиск, обнаружение целей и относительно грубое измерение их координат. Такие РЛС обеспечивают получение информации о многих целях одновременно. Отличительный признак этих РЛС — работа в режиме периодического обзора некоторой зоны пространства. Обзорные РЛС используются для наблюдения воздушного пространства, земной или водной поверхности.
2. РЛС следящего типа. Назначение таких РЛС — точное измерение и непрерывная выдача информации о значениях координат целей. РЛС следящего типа осуществляют слежение за одной или несколькими целями. В частности, РЛС следящего типа применяются для управления оружием, слежения за самолетами в системах УВД.
3. Специализированные измерители и РЛС ближнего действия. К этому типу отнесем устройства, выполняющие некоторую частную задачу. Как правило, такие устройства измеряют один параметр положения или движения цели (объекта) и работают по заведомо одной цели. По назначению рассматриваемые устройства обладают большим разнообразием. В качестве примера укажем на РЛС, используемые как навигационные измерители — самолетный радиовысотомер, доплеровский измеритель вектора скорости самолета.
Существуют также комбинированные и многофункциональные РЛС. В комбинированной системе совмещаются обзорная и следящая РЛС. Наиболее совершенными являются многофункциональные РЛС. Такие РЛС могут одновременно совершать обзор пространства и слежение за целями.
Схемно-техническое построение и конструкция РЛС в существенной мере зависят от места (объекта) размещения, от способа формирования и обработки сигналов. По месту установки РЛС подразделяются на наземные (стационарные и передвижные) и бортовые: самолетные, космические, корабельные.
По способу формирования и обработки сигналов различают РЛС импульсные и с непрерывным излучением, когерентные и некогерентные, одноканальные и многоканальные.
Характеристики и параметры систем радиолокации принято подразделять на тактические и технические. Первые из них определяют возможности практического использования системы.
Перечислим основные тактические характеристики и параметры.
1. Зона действия (рабочая зона) — область пространства, в которой РЛС выполняет свои функции, определенные ее назначением.
2. Измеряемые координаты и точности их измерения. Измеряемые координаты определяются назначением РЛС. Существуют одно-, двух- и трехкоординатные РЛС. Измерение координат сопровождается погрешностями, которые ограничивают возможности тактического использования РЛС. Чрезмерное увеличение точности приводит к усложнению конструкции и к неоправданному повышению стоимости системы.
3. Разрешающая способность РЛС характеризует возможность раздельного наблюдения целей и измерения их параметров при малом отличии этих параметров. Различают разрешение по дальности, по направлению и по скорости. Цели, не разрешаемые ни по дальности, ни по направлению, ни по скорости, воспринимаются радиолокатором как одна цель. Во многих случаях тактического применения РЛС разрешающая способность является характеристикой первостепенной важности, определяющей саму возможность практического использования РЛС.
4. Помехозащищенность характеризуется способностью РЛС выполнять свои функции в условиях воздействия различного рода помех, естественных и организованных.
5. Пропускная способность определяется плотностью случайного потока целей, информация о которых обрабатывается радиолокатором и выдается с заданной точностью.
6. Время развертывания (приведения в рабочее состояние). Этот параметр характеризует возможность использования РЛС в условиях скоротечно изменяющейся обстановки.
mirznanii.com
Радиолокационная система — Большая Энциклопедия Нефти и Газа, статья, страница 1
Радиолокационная система
Cтраница 1
Радиолокационная система с синтезированной апертурой антенны Траверс предназначена для анализа типов и состояния растительного покрова Земли, измерения влажности почв, топографирования земной поверхности, определения шероховатости снежного и ледового покровов. [1]
Радиолокационные системы, обладающие высокой разрешающей способностью по углам и дальности, позволяют получать достаточно подробную картину окружающей местности. Типичным случаем такого использования радиолокатора является установка для наблюдения за аэродромом, рассчитанная на получение картины расположения самолетов и автомашин на взлетных дорожках и подъездных полосах с точностью, достаточной для управления движением. Чтобы избежать влияния отражений от земли и близких строений, антенна обычно располагается на верху вышки управления. [2]
Радиолокационные системы с частотной модуляцией используются для определения расстояния до объекта путем сравнения двух частот: частоты передатчика и частоты отраженного от объекта сигнала. Для того чтобы эти частоты можно было сравнить и на основе этого определить расстояние до объекта, в передатчике осуществляется частотная модуляция колебаний по линейному закону. Если теперь сравнить частоты излученного и отраженного колебаний, то они окажутся неравными, так как за время распространения колебания от передатчика до объекта и обратно частота передатчика изменялась. [3]
Радиолокационные системы с частотной модуляцией используют для определения расстояния до объекта путем сравнения двух частот: передатчика и отраженного от объекта сигнала. Чтобы эти частоты можно было сравнить и на основе этого опрделить расстояние до объекта, в передатчике осуществляют частотную модуляцию колебаний по линейному закону. Если теперь сравнить частоты излученного и отраженного сигналов, то они окажутся неравными, так как за время распространения сигнала от передатчика до объекта и обратно частота передатчика изменилась. [4]
Радиолокационные системы устанавливаются на различных объектах и выполняют различные функции. Наиболее широко применяется импульсная совмещенная система радиолокации. Разне-сенные системы используются реже, например, в случае так называемого полуактивного наведения снарядов. Снаряд с приемником на борту настраивается на энергию, отражаемую от цели, которую облучает отдельный передатчик, обычно расположенный на земле. [5]
Радиолокационная система наблюдения за осадками PR ( Precipitation Radar) разрабатывается агентством NASDA при головном исполнителе Toshiba. Прибор PR является первой РЛС контроля погоды космического базирования. Система оснащается плоской антенной решеткой размерами 2.1 х 2.1 м и массой 376 кг, состоящей из 128 щелевых вол но водных излучателей с ТТПУ. [6]
Радиолокационная система самонаведения ( рис. 14.1) включает в себя радиолокационную станцию для определения координат цели, счетно-решающую аппаратуру и исполнительные устройства, воздействующие на органы управления. [7]
Радиолокационные системы посадки предназначены для контроля за воздушным движением в районе аэродрома и обеспечения безопасной посадки летательных аппаратов в сложных метеоусловиях днем и ночью по командам с земли. [8]
Радиолокационные системы посадки используются: или как средства контроля воздушного движения — в этом случае экипаж заходит на посадку по системе ОСП или РМСП ( КГС), или визуально, а диспетчер контролирует заход и в необходимых случаях информирует экипаж о положении ЛА относительно линии курса и глиссады планирования; или как активное средство захода на посадку по требованию командира корабля — в этом случае диспетчер полностью руководит заходом ЛА на посадку. [9]
Доплеровские радиолокационные системы применяются в приборах предупреждения и сигнализации о приближении движущихся целей, в радиовзрывателях, в устройствах для селекции подвижных целей. [10]
Усовершенствованная радиолокационная система ASAR ( Advanced Synthetic Aperture Radar) является усовершенствованным вариантом РЛС с синтезированной апертурой, использованной на ИСЗ серии Ers. Возможен режим переключаемой поляризации ( горизонтальной и вертикальной) на прием и на передачу. При этом скорость передачи информации в реальном масштабе времени составляет 100 Мбит / с, передача может осуществляться до 30 мин за один виток. [11]
Радиолокационные системы тактического управления средствами ПВО обеспечивают быструю непрерывную и точную информацию о трех координатах положения выбранных целей. Например [399], в наземной установке тактического управления используется многолучевая антенная система, вращающаяся со скоростью 10 об / мин. [12]
Радиолокационная система бокового обзора Торос позволяет получать изображение местности в масштабах 1: 90 000 и 1: 180000 при минимальной высоте съемки 2 км, максимальной 5 — 6 км. [13]
Радиолокационные системы посадки самолетов предназначены для обеспечения посадки как одиночных, так и групп самолетов, не имеющих специального радиотехнического посадочного оборудования, а снабженных только обычными пилотажно-навигационными приборами и радиостанциями. В таких системах положение самолетов относительно ВПП и линии планирования определяется с помощью специального наземного посадочного радиолокатора высокой точности. Посадка самолетов осуществляется по командам с Земли, которые передаются экипажам по радио с командно-диспетчерского пункта аэродрома. [14]
Радиолокационные системы бокового обзора ( РЛС БО) относятся к числу наиболее универсальных и информативных датчиков дистанционного зондирования в микроволновом диапазоне. При этом различают некогерентные радиолокационные системы, азимутальная ( вдоль трассы ИСЗ) разрешающая способность которых определяется размерами реальной апертуры антенны, а также РЛС с синтезированием апертуры, в которых высокая разрешающая способность достигается за счет когерентной обработки отраженных сигналов, принимаемых по мере движения спутника по орбите. [15]
Страницы: 1 2 3 4
www.ngpedia.ru
Радиолокационная система
Радиолокационная система, содержит антенный блок, последовательно соединенный посредством бесконтактного вращательного перехода с СВЧ трактом, передающим модулем и приемным модулем, имеющим в своем составе блок связи и синхронизации и компьютерный индикатор с платой радар-процессора. Антенна содержит щелевой излучатель, установленный с зазором относительно стенок формирующего рупора. Зазор заполнен диэлектриком. На выходе рупора размещен печатный поляризационный фильтр, между которым и зеркальным отражателем размещен вращатель поляризации. Передающий модуль генерирует импульсные сигналы миллиметрового диапазона длин волн, длительность которых находится в пределах 0,035 — 2,0 мкс, и синхронизирующие импульсные сигналы, задний фронт которых совпадает с передним фронтом сигналов, отраженных от цели и принятых и обработанных приемным модулем, который содержит малошумящий входной усилитель и дополнительный канал автоподстройки частоты с отдельным смесителем, при этом блок связи и синхронизации снабжен последовательным каналом связи, соединенным посредством блока сопряжения и коммутации с компьютерным индикатором и соединен с передающим и приемным модулями. Технический результат заключается в повышении разрешения системы по дальности и угловой координате и помехоустойчивости. 2 з.п. ф-лы, 3 ил.
Изобретение относится к области радиолокации, а именно к радиолокационным системам миллиметрового диапазона, и может быть использовано в качестве судовых и береговых систем, предназначенных для обнаружения надводных и береговых целей, измерения их координат и параметров движения.
Известна радиолокационная система миллиметрового диапазона, включающая передающее устройство с антенным блоком, приемник сигнала, отраженного от наблюдаемого объекта, и цифровой процессор для обработки и анализа последнего (US Патент N 5,315,303, G 01 S 13/04, 1994). Недостатки известной радиолокационной системы заключаются в отсутствии кругового обзора, малом радиусе действия по дальности и низкой разрешающей способности по углу, что затрудняет ее использование в качестве навигационной системы. Наиболее близкой предлагаемому изобретению является береговая радиолокационная система сантиметрового диапазона, содержащая передающий модуль, антенный блок с щелевым излучателем и рупором, приемный модуль, индикатор и блок синхронизации (А.М. Байрашевский, Н.Т. Ничипоренко Судовые радиолокационные системы. -М.: Транспорт, 1982, стр. 294-305). Решение навигационных задач с требуемой точностью с помощью известной радиолокационной системы затруднено вследствие использования в ней линейной поляризации сигнала, не обеспечивающей достаточной помехозащищенности системы в условиях атмосферных помех, а также за счет ее работы с большой длительностью излучаемых импульсов. При этом возможно увеличение ее недостаточной разрешающей способности по углу посредством увеличения размеров антенны, что сопряжено с возникновением аппаратных сложностей и повышением стоимости производства и последующих эксплуатационных затрат. Отсутствие цифровой обработки сигнала и отображение информации на яркостном экране также снижает эксплуатационные характеристики известной радиолокационной системы. Задачей, на решение которой направлено создание предлагаемого изобретения, является улучшение эксплуатационных характеристик радиолокационной системы. Технический результат от использования предлагаемого изобретения заключается в повышении разрешения системы по дальности и угловой координате, уменьшении ширины диаграммы направленности антенны в горизонтальной плоскости при малых горизонтальных размерах, а также повышении помехоустойчивости системы и улучшении системы отображения информации. Указанный технический результат достигается тем, что в радиолокационной системе, включающей передающий модуль, антенный блок с щелевым излучателем и рупором, приемный модуль, блок связи и синхронизации и индикатор, согласно изобретению излучатель размещен относительно стенок рупора с зазором, заполненным диэлектриком, и снабжен последовательно установленными на выходе рупора печатным поляризационным фильтром и вращателем поляризации, при этом передатчик генерирует импульсные сигналы миллиметрового диапазона длин волн с длительностью импульса в пределах 0,035 — 0,2 мкс и синхронизирующие импульсные сигналы, задний фронт которых совпадает с передним фронтом сигналов, отраженных от цели и принятых и обработанных приемным модулем, который содержит малошумящий входной усилитель и дополнительный канал автоподстройки частоты с отдельным смесителем и схемой поиска и удержания частоты, а блок связи и синхронизации снабжен последовательным каналом связи, соединенным посредством блока сопряжения и коммутации с индикатором, содержащим компьютер с платой радар-процессора и монитор, причем вращающийся переход, соединяющий приемный и передающий модули с антенной, выполнен бесконтактным, а вращатель поляризации выполнен в виде наклонных диэлектрических пластин, установленных с возможностью поворота вокруг общей оси. Создание круговой поляризации излучаемого сигнала, устойчивого к атмосферным помехам, таким, как снег, град, туман, дождь, низкая облачность, посредством вращателя поляризации, а также эффективное гашение уровня боковых лепестков диаграммы направленности антенны в горизонтальной плоскости посредством диэлектрика, размещенного в зазоре между стенками рупора и щелевым излучателем, обеспечивают повышение отношения сигнал/шум и увеличение разрешающей способности системы. Кроме того, наличие печатного поляризационного фильтра на выходе рупора антенны обеспечивает эффективное гашение вертикальной составляющей поля излучателя (кросс-поляризации), так как при свободном прохождении горизонтальной составляющей поля происходит отражение вертикальной составляющей, что позволяет исключить прием ложных сигналов, улучшая тем самым работу радиолокационной системы в целом. Предлагаемое выполнение вращателя поляризации с возможностью изменения угла наклона диэлектрических пластин обеспечивает изменение эллиптичности круговой поляризации излучаемого сигнала, что в свою очередь позволяет оперативно адаптировать систему к типу возникающих атмосферных помех. Известно, что информативность радиолокационной системы пропорциональна частоте f3 зондирующих импульсов, то есть возрастает при уменьшении длины волны зондирующего импульса. Отсюда следует, что информативность радиолокационной системы миллиметрового диапазона длин волн на полтора — два порядка выше, чем у радиолокационных систем сантиметрового диапазона и на три порядка выше, чем у радиолокационных систем дециметрового диапазона длин волн. При этом уменьшение ширины диаграммы направленности системы в горизонтальной плоскости г и длительности импульса позволяет улучшить разрешающую потенциальную способность системы по углу o и по дальности д, так как o = 0,7г а д= C/2, где C — скорость света. Вследствие этого уменьшается среднеквадратичная потенциальная погрешность измерения дальности до объекта и углового положения объекта, увеличивается дальность обнаружения низко расположенных малых объектов (например, шлюпки, пловцы, знаки навигационного ограничения), так как в миллиметровом диапазоне длин волн нижний лепесток диаграммы направленности в вертикальной плоскости больше «прижимается» к подстилающей поверхности. При одинаковых физических размерах антенны в миллиметровом диапазоне можно получить больший коэффициент усиления антенны, чем в сантиметровом. Предлагаемая совокупность параметров работы излучателя в миллиметровом диапазоне длин волн и конструктивное выполнение антенного блока обеспечивают создание кругового обзора с узкой диаграммой направленности антенны в горизонтальной плоскости (0,2 — 0,4o) при допустимых размерах раскрыва антенны (2,5 м-1,5 м соответственно), что по сравнению с известными системами позволяет значительно увеличить разрешающую способность по направлению и в совокупности с высоким разрешением по дальности приводит к уменьшению разрешающих площадей и разрешающего объема. Тем самым обеспечивается повышение информационной емкости системы, ее помехоустойчивость, то есть обеспечивается повышение точности измерений и подробности наблюдаемого объекта, а также возможность использования новых информативных параметров: ракурс цели, длина, ширина. Выбор указанного диапазона длительности излучаемого импульса поясняется следующим. С одной стороны, для уменьшения считывающего разрешаемого объема, пропорционального длительности импульса , необходимо уменьшение длительности излучаемого импульса. Однако генерация импульса с длительностью, меньшей 0,035 мкс, трудно реализуема в связи со сложностью изготовления передатчика. С другой стороны, увеличение длительности импульса обеспечивает увеличение дальности действия радиолокационной системы, но при более 0,2 мкс ухудшается разрешающая способность системы по дальности. Таким образом, именно указанный диапазон изменения длительности излучаемого импульса обеспечивает повышение информационной емкости системы и ее высокую разрешающую способность по дальности. Улучшение эксплуатационных характеристик в предлагаемой радиолокационной системе обеспечивается также и генерированием передающим модулем синхронизирующего импульсного сигнала, что позволяет выполнять подачу в компьютерный индикатор видео- и синхросигналов по одному кабелю, обеспечивая тем самым предотвращение рассогласования этих сигналов по времени и экономию линии передачи сигналов. Включение в состав приемного модуля блока связи и синхронизации, снабженного последовательным каналом связи, и блока сопряжения и коммутации обеспечивает управление работой радиолокационной системы посредством компьютерного индикатора по стандартному каналу связи, то есть обеспечивает возможность подключения к радиолокационной системе компьютера любой модификации. Улучшение эксплуатационных качеств предлагаемой радиолокационной системы обеспечивается также и за счет выполнения вращательного перехода, соединяющего приемный и передающий модули с антенной бесконтактным, то есть некритичным к величине зазора и несоосности узлов антенны и приемного и передающего модулей. Предлагаемая радиолокационная система представлена следующими графическими материалами: фиг.1 — структурная схема радиолокационной системы; фиг.2 — структурная схема антенны, разрез; фиг.3 — структурная схема радар-процессора. Антенна 1 приводится в движение приводом 2 и последовательно соединена посредством вращающегося перехода 3 с СВЧ трактом 4, передатчиком 5 передающего и приемником 6 приемного модулей. СВЧ тракт включает в себя циркулятор 7, разделяющий сигналы на передачу и прием, ответвитель 8 и аттенюатор 9 для подачи СВЧ-импульса от передатчика 5 на вход приемника 6. Передатчик 5 содержит магнетрон 10, импульсный модулятор 11, а также схему 12 управления и контроля и блок 13 формирования синхронизирующего импульса. Приемник 6 содержит защитное входное устройство 14, малошумящий усилитель 15, смеситель 16, гетеродин 17, предварительный усилитель промежуточной частоты 18, основной усилитель промежуточной частоты 19 с логарифмической амплитудно-частотной характеристикой, детектор 20 и видеоусилитель 21, соединенный с блоком 22 связи и синхронизации и блоком 23 сопряжения и коммутации, выход которого соединен со входом компьютерного радиолокационного индикатора 24, содержащего плату радар-процессора 25. Блок 22 соединен также с передатчиком 5 и приемником 6. Приемник 6 дополнительно содержит канал автоподстройки частоты с отдельным смесителем 26 и блок 27 автоматической подстройки частоты гетеродина 17. Антенна 1 включает в себя щелевой излучатель 28, установленный с зазором относительно формирующего рупора 29. Зазор заполнен диэлектриком 30. На выходе рупора 29 размещен печатный поляризационный фильтр 31, между которым и зеркальным отражателем 32 размещен вращатель поляризации 33. Плата радар-процессора 25 содержит блок 34 входных устройств, предназначенный для согласования входных сигналов по уровню, полярности, волновому сопротивлению, а также для улучшения фронтов импульсных сигналов и выделения импульсов синхронизации, блок 35 предварительных преобразований, предназначенный для предварительной фильтрации сигналов методом порогового отбора и компрессии, блок 36 фильтрации, предназначенный для выделения сигнала на фоне помех путем линейной и нелинейной фильтрации равноудаленных дискрет по угловой координате, а также путем статистической обработки дискрет по дальности. Плата радар-процессора 25 содержит также блок 37 согласования, предназначенный для согласования потока информации после фильтрации с емкостью устройств хранения и скоростью передачи данных, блок 38 обмена с шиной 39 ЭВМ, осуществляющий согласование во времени работы платы радар-процессора 25 и ЭВМ. Для управления режимами работы радар-процессора 25 осуществляется передача команд оператора через шину 39, блок связи 40, предназначенный для записи команд управления и обеспечения режима «чтения» однобайтовыми и двухбайтовыми словами в блок 41 управления, который обеспечивает управление работой всех блоков обработки информации радар-процессора 25. Сведения, подтверждающие возможность осуществления изобретения Предлагаемая радиолокационная система работает следующим образом. После подачи питания и прогрева магнетрона 10 вырабатывается сигнал готовности к работе передатчика 5. Блок 22 связи и синхронизации подает команду запуска на схему 12 управления и контроля передатчика 5, который формирует импульс запуска, поступающий в модулятор 11, где формируется импульс необходимой длительности и напряжением Uмод. Модулирующее напряжение Uмод подается на магнетрон 10, который генерирует СВЧ-радиоимпульс заданной длительности, поступающий через циркулятор 7 СВЧ тракта 4 и вращательный переход 3 на антенну 1, и излучается в пространство. Вращательный переход 3 представляет собой две отдельные секции, одна из которых конструктивно размещена на антенне 1, а вторая в съемном контейнере приемопередающего модуля. Секции представляют собой круглые волноводы, плавно переходящие в волноводы прямоугольного сечения, содержащие поляризационные пластины, создающие в круглых волноводах волну круговой поляризации. При этом две таких секции, образующие вращательный переход 3, электрически соединены через воздушный зазор между двумя круглыми фланцами с дроссельными канавками. Таким образом, вращательный переход 3 является бесконтактным и некритичным к величине зазора между фланцами волноводов и их соосности. Снабженная вращателем поляризации 33, выполненным в виде наклонных пластин, установленных с возможностью поворота вокруг общей оси (условно не показаны), антенна 1 формирует при наличии пластин перед рупором 31 поле круговой поляризации, а при отклонении пластин вниз — поле с линейной горизонтальной поляризацией. Часть энергии излучаемого импульса снимается с магнетрона 10 и с помощью блока 13 формирования синхронизирующего импульса происходит выделение синхронизирующего импульса, задний фронт которого совпадает с передним фронтом импульсного сигнала, отраженного от цели и принятого и обработанного приемником 6, что обеспечивает возможность последующей подачи указанных импульсных сигналов в компьютерный радиолокационный индикатор 24 по одному кабелю, предотвращая рассогласование сигналов по времени. Выделенный синхронизирующий импульс поступает на вход блока 22 связи и синхронизации, который вырабатывает синхронизирующий импульс для последующего смешения с видеоимпульсом. Принятый антенной 1 отраженный от цели сигнал поступает через вращающийся переход 3, циркулятор 7 СВЧ тракта 4 в приемник 6, на входе которого установлено устройство защиты 14, предназначенное для защиты малошумящего усилителя 15 от сигнала, просачивающегося от передатчика 5. С выхода устройства защиты 14 сигнал поступает на малошумящий усилитель 15, установленный для усиления слабых сигналов и увеличения динамического диапазона приемника 6. С выхода последнего СВЧ-импульс поступает на основной вход смесителя 16, а на гетеродинный вход смесителя 16 поступает сигнал с гетеродина 17. В смесителе 16 происходит преобразование импульса СВЧ в импульс промежуточной частоты, который усиливается каскадом предварительного усилителя 18 промежуточной частоты и поступает на вход основного усилителя 19 промежуточной частоты, где происходит основное усиление сигнала на промежуточной частоте, а также его детектирование и усиление посредством детектора 20 и видеоусилителя 21 соответственно. В выходном каскаде видеоусилителя 21 к видеосигналу подмешивается импульс синхронизации, выделенный блоком 22 связи и синхронизации. Полученный видеоимпульс поступает через блок 23 сопряжения и коммутации на вход платы 25 радар-процессора, установленной в компьютерном радиолокационном индикаторе 24. Для поддержания постоянного значения разностной частоты между частотой передатчика 6 и частотой гетеродина на вход смесителя 26 передается незначительная часть мощности импульса излучаемого передатчиком 5 посредством ответвителя 8 и аттенюатора 9 СВЧ тракта 4. Смеситель 26 преобразует поступающий на вход СВЧ-импульс в радиоимпульс промежуточной частоты, который подается на вход блока 27 автоматической подстройки частоты гетеродина 17. В зависимости от величины отклонения частоты поступающего радиоимпульса от номинального значения промежуточной частоты блок 27 вырабатывает управляющее напряжение, которое поступает на варактор гетеродина 17, перестраивая его таким образом, чтобы поддерживать с требуемой точностью значение промежуточной частоты, равное значению номинальной частоты. При работе радиолокационной системы в режиме секторного обзора со снятием излучения в нерабочем секторе углов блок 27 обеспечивает запоминание частоты гетеродина 17 на время паузы в работе передатчика 5. Для обеспечения работы радиолокационной системы при различных длительностях импульса в блоке 27 предусмотрены две полосы пропускания усилительного тракта. При работе с короткими импульсами полоса пропускания соответствует 33 МГц, а при работе с более широкими импульсами — 7 МГц. Блок 22 связи и синхронизации посредством последовательного канала связи обеспечивает также передачу команд управления и контроля от компьютерного радиолокационного индикатора 24 через блок 23 сопряжения и коммутации к передатчику 5 и приемнику 6. Запись поступающей в радар-процессор 25 информации осуществляется в память, организованную в виде двух блоков (страниц). В одну из страниц записываются текущие данные, а на другую могут считываться данные, записанные ранее. Информация, поступающая в радар-процессор 25, обрабатывается в два этапа. Первый этап начинается с приходом видео- и синхроимпульсов и заканчивается записью в память всей последовательности дискретных отсчетов по дальности. На этом этапе сигналы подвергаются следующим процедурам: масштабированию, дискретизации, квантованию, предварительному пороговому отбору вида «цель-не цель» и записи в память. Второй этап начинается вслед за первым и заканчивается записью в буфер 38 обмена с шиной 39 предварительной обработки информации по линейке. При этом реализуются следующие процедуры: пространственно-временная фильтрация, сопряжение по плотности потока информации, управляемая запись в буфер 38 обмена с шиной 39, через которую информация поступает в компьютер для дальнейшей вторичной обработки, представления первичной и вторичной информаций на мониторе, хранения и трансляции по локальным вычислительн ым сетям.Формула изобретения
1. Радиолокационная система, содержащая передающий модуль, имеющий в своем составе антенный блок с щелевым излучателем и рупором, последовательно соединенный посредством вращательного перехода с приемным модулем, включающим блок связи и синхронизации и индикатор, отличающаяся тем, что щелевой излучатель размещен относительно стенок рупора с зазором, заполненным диэлектриком и снабжен последовательно установленными на выходе рупора печатным поляризационным фильтром и вращателем поляризации, передающий модуль генерирует импульсные сигналы миллиметрового диапазона длин волн, длительность которых находится в пределах 0,035 — 2,0 мкс и синхронизирующие импульсные сигналы, задний фронт которых совпадает с передним фронтом сигналов, отраженных от цели и принятых и обработанных приемным модулем, приемник которого также содержит малошумящий входной усилитель и дополнительный канал автоподстройки частоты с отдельным смесителем, при этом блок связи и синхронизации обеспечивает передачу команд управления и контроля к передатчику и приемнику соответственно передающего и приемного модулей и снабжен каналом связи, соединенным посредством блока сопряжения и коммутации с индикатором, содержащим компьютер с платой радар-процессора и монитор. 2. Радиолокационная система по п.1, отличающаяся тем, что вращательный переход, соединяющий приемный и передающий модули с антенным блоком, выполнен бесконтактным. 3. Радиолокационная система по п.1, отличающаяся тем, что вращатель поляризации выполнен в виде наклонных диэлектрических пластин, установленных с возможностью поворота вокруг общей оси.РИСУНКИ
Рисунок 1, Рисунок 2, Рисунок 3NF4A Восстановление действия патента
Дата, с которой действие патента восстановлено: 20.03.2011
Дата публикации: 20.03.2011
www.findpatent.ru