Радиолокационная станция — Википедия
Материал из Википедии — свободной энциклопедии
Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 27 июня 2018; проверки требует 1 правка. Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 27 июня 2018; проверки требует 1 правка. Радар с параболической антеннойРадиолокационная станция (РЛС), рада́р (англ. radar от radio detection and ranging — радиообнаружение и измерение дальности) — система для обнаружения воздушных, морских и наземных объектов, а также для определения их дальности, скорости и геометрических параметров. Использует метод радиолокации, основанный на излучении радиоволн и регистрации их отражений от объектов. Английский термин появился в 1941 году как звуковая аббревиатура (англ. RADAR), впоследствии перейдя в разряд самостоятельного слова[1][2][3].
Современный радар на основе ФАР. Станция PAVE PAWS системыВторичные радиолокационные системы (ВРЛС)
 Вторичная радиолокационная система представляет собой совокупность ВРЛ, устанавливаемого на земле, и ответчиков, устанавливаемых на борту ВС
Вторичная радиолокационная система представляет собой совокупность ВРЛ, устанавливаемого на земле, и ответчиков, устанавливаемых на борту ВС
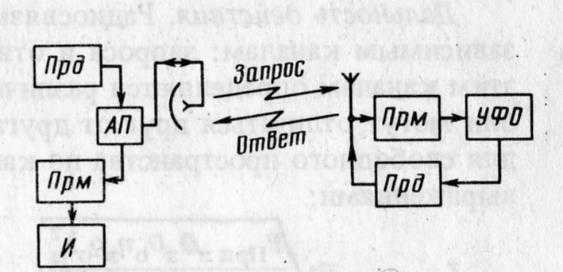
Рис. 63 . Структурная схема вторичной радиолокационной системы (ВРЛС)
(рис.63). ВРЛ вырабатывает кодированные запросные сигналы, представляющие несколько высокочастотных импульсов, отстоящих друг от друга на определенные временные интервалы (коды запроса). Через направленную в горизонтальной плоскости антенну запросные коды излучаются в пространство.
На борту ВС запросные сигналы принимаются ответчиком, и после усиления и преобразования в устройстве формирования ответа УФО образуется ответный кодированный сигнал (ответные коды), который излучается передатчиком ответчика через ненаправленную антенну в пространство. Ответный сигнал представляет набор импульсных сигналов, которые в закодированном виде содержат ответную дополнительную информацию. ВРЛ принимает ответные сигналы, которые после усиления и преобразования поступают на индикаторные устройства. Одной из особенностей системы вторичной радиолокационной системы является то, что несущие частоты, на которых передаются запросы и ответы, выбираются различными. В системах ВРЛ обнаружение ВС и измерение их координат (азимута и наклонной дальности) осуществляется, так же как и в ПРЛС. При распространении запросов от ВРЛ до ВС и ответов от ВС до ВРЛ происходит их запаздывание во времени на величину
tз = 2r/c + t0,
где t0 — дополнительная задержка, связанная с формированием ответного сигнала и его обработкой в ВРЛ.
Время запаздывания ответных сигналов зависит только от расстояния до ВС, поскольку задержка t0 — величина постоянная. Время tз измеряется непосредственно по индикатору, тем самым измеряется расстояние r между ВРЛ и ВС. Азимут ВС определяется по углу поворота антенны ВРЛ в момент поступления ответных сигналов. Дополнительная информация после специальной обработки отображается на обычных индикаторах в виде дополнительных отметок либо на специальных индикаторах (цифровые табло, знаковые ЭЛИ). Во вторичных радиолокационных системах (ВРЛС) УВД в качестве дополнительной информации передаются бортовой номер, высота полета, запас топлива, сигналы бедствия, потери радиосвязи и др.
Дальность действия ВРЛС.
Радиосвязь в ВРЛС осуществляется по двум независимым каналам: запроса и ответа. Дальности действия системы по этим каналам в общем случае могут отличаться друг от друга. Максимальные дальности действия для свободного пространства по каналам запроса и ответа определяются выражениями:
rсв max з = ; rсв max o = (4),
где Р Прд з — импульсная мощность передатчика ВРЛ; D з — КНД антенны ВРЛ при передаче; Dо — КНД антенны ответчика при приеме; η з — к.п.д. антенно-фидерного тракта ВРЛ при передаче; η о — к.п.д. антенно-фидерного тракта ответчика при приеме; λ з — длина волны запросного сигнала; Р Прм mino — чувствительность приемника ответчика; РПрд о — импульсная мощность передатчика ответчика; — КНД антенны ВРЛ при приеме; — КНД антенны ответчика при передаче; — к.п.д. антенно-фидерного тракта ВРЛ при приеме;
— к.п.д. антенно-фидерного тракта ответчика при передаче; — длина волны ответного сигнала; Р Прм min з — чувствительность приемника ВРЛ.
Дальность действия системы определяется меньшей из величин rmax з и rmin о. Выражения (4) показывают, что максимальная дальность действия прямо пропорциональна корню второй степени из отношения мощности Прд к чувствительности Прм. Для ПРЛС (см. выражение 1) она пропорциональна четвертой степени из этого же отношения. Это значит, что при одинаковых отношениях мощности Прд к чувствительности Прм во вторичных РЛС обеспечивается большая дальность действия либо обеспечивается такая же дальность при значительно меньшей мощности Прд. В ВРЛ применяются Прд с мощностью, на два или даже на три порядка меньшей, чем в Прд ПРЛС.
Кодирование сигналов
Кодирование сигналов в ВРЛС производится в каналах запроса и ответа для представления информации, передаваемой по этим каналам, и для повышения помехоустойчивости ВРЛС. Режим импульсного излучения вынуждает использовать в ВРЛС различные разновидности импульсных кодов. Так как разработка ВРЛС в России осуществлялась независимо от западных разработок, стандарты, стандарты на них в России и ИКАО оказались различными. Это различие, прежде всего, коснулось кодов. Российский код называется кодом УВД, международный — кодом RBS, причем в отечественных ответчиках предусмотрена возможность работы с кодами УВД и RBS.
При реализации режима УВД в канале запроса поочередно излучаются двухимпульсные кодовые посылки для запроса бортового номера (1-я посылка), высоты полета (2-я посылка), путевой скорости (3-я посылка) и координатной отметки (4-я посылка). Эти посылки отличаются временным интервалом между импульсами кодовой пары.
Ответные УВД состоят из трех частей (рис.64). Первая его часть представляет так называемую координатную двухипульсную посылку КК, с помощью
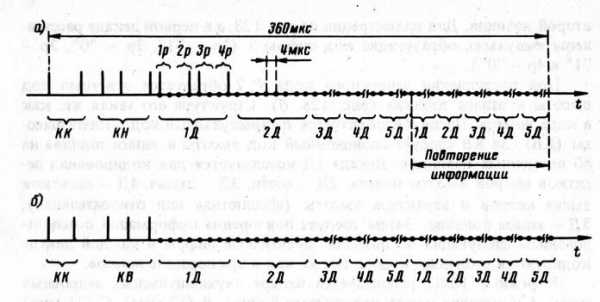
а) код бортового номера; б) код высоты
Рис. 64. Структура ответных кодов в режиме “УВД”
которой формируется отметка ВС на экране индикатора, вторая — ключевой трехимпульсный код, обозначающий содержание информации следующей в третьей, информационной части кода. Ключевой код имеет три разновидности. Это может быть код ключа номера КН, либо ключ высоты КВ, либо ключ скорости КС.
Третья информационная часть ответного кода представляет собой многоимпульсный позиционный двоично-десятичный код, для которого выделено 80 временных позиций, отстоящих друг от друга на 4 мкс. Каждые 8 временных позиции называются декадами и предназначены для представления нулей и единиц, с помощью которых формируются десятичные цифры и числа. Для отображения единиц и нулей используется по две позиции. Единице соответствует импульс на первой временной позиции, нулю — на второй . Если ответный код содержит информацию о бортовом номере , то первая декада отображает единицы номера, вторая — десятки, третья — сотни, четвертая — тысячи, пятая — десятки тысяч. Таким образом, информация о бортовом номере занимает 40 временных позиций. Остальные 40 служат для повторения информации о бортовом номере в интересах повышения его верности.
Ответный код высоты и запаса топлива имеет сходную структуру. Вначале следует координатный код КК и код ключа высоты КВ (рис.64,б). Далее идут 80 позиции, разделенные на 10 восьмиэлементных декад, каждая из которых обеспечивает кодирования десятичных цифр. Первая декада отображает десятков метров высоты, вторая — сотен, третья — тысяч, четвертая — десятков тысяч и вида информации о высоте (абсолютная или относительная), пятая представляет запас топлива. Последующие пять декад, как и прежде, служат для повторения этой информации.
Путевой угол кодируется с помощью первых 10 пар информационных импульсов, каждая из которых позволяет отобразить угол с дискретностью 1800/256 значениями, кратными этим минимальным долям. Путевая скорость передается с дискретностью 5,9 м/с десятью следующими парами. Численное значение путевого угла и скорости определяется суммой численных значений, закрепляемых за отдельными разрядами, в которых фигурируют единицы.
Международный код RBS имеет следующую структуру (рис.65,в).
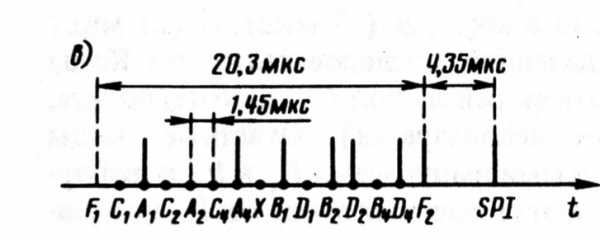
Рис. 65 . Структура ответного кода номера (7306) в режиме RBS
Запросные сигналы представляют собой 4 вида двухимпульсные кодов А, В, С и D. Коды А и В служат для запрос номера рейса, С — высоты, D — резервный. Ответные коды более сложные. Они содержат два опорных импульса F 1 и F2 соответствующих координатному коду КК и серию информационных импульсов, располагаемых на 13 временных позициях между опорными импульсами. Номер рейса и высота полета передаются четырьмя группами импульсов А, В, С и D, каждая из которых отображает цифру восьмеричной системы счисления. Для отображения цифр от 0 до 7 в каждой группе имеется три позиции, обозначенных буквами А1, А21, А4 , В1 , В2, В4 и т.д. Позиция, занимаемая импульсом, имеет значение двоичной единицы, пустая — нуля. Таким образом, здесь реализована четырехзначная двоично-восьмеричная система счисления, позволяющая отобразить 4096 номеров ВС, высоты в пределах 103…105 футов с дискретностью 100 футов. При передаче информации о номере импульсы группы А кодируют информацию, соответствующую тысячам, В — сотням, С — десяткам и D — единицам десятичных чисел. Число 7700 служит для передачи сигнала бедствия, число 7600 — сообщения о потере радиосвязи, 7500 — о нападении на экипаж.
Дополнительный импульс SPI предназначен для индивидуального опознавания и передается по запросу по каналм радиосвязи с земли. Импульс выдается в течение 10…30с при нажатии кнопки “Знак” на пульте управления бортовым ответчиком.
При передаче информации о высоте порядок передачи групп импульсов информационного кода установлен следующим: D, А, В, С. В группе D используется две позиции D2 и D4 позиция D1 свободна и передаются три градации высоты ценой 32000 футов каждая. Позициями групп А и В передается по 7 градаций ценой соответственно 4000 и 500 футов каждая, а позициями группы С — 5 градаций по 100 футов. Последняя пятая градация передается цифрой 7 . Цифры 5 и6 не используются. Максимальная высота, которая кодируется таким методом, будет равна сумме произведений чисел градаций на их цену, т.е. 128000 футов. Так как отсчет высоты производится от остаточной высоты 1300 футов, то максимальная передаваемая высота будет 126700 футов.
Процесс заполнения позиций и градаций идет следующим образом. После заполнения пяти градаций С двоичная единица передается на позиции В. Позиция С при этом обнуляется. После заполнения пяти градаций В единица передается позиции А, а после ее заполнения позиции D. Заполнение может изменяться как в большую, так и в меньшую сторону.
Помехи, создаваемые боковыми лепестками ДНА антенны. Во вторичном радиолокаторе используются антенны направленного излучения, которые излучают и принимают основную часть энергии в пределах узкого сектора (главный лепесток ДНА), но они также излучают и принимают часть энергии сигналов и в других направлениях (боковые лепестки ДНА). По этим лепестка, так же как и по главному лепестку, происходит излучение запросных и прием ответных сигналов. При уменьшении расстояния между ВС (ответчиком) и ВРЛ ответчик будет срабатывать не только от сигналов главного лепестка, но и от сигналов боковых лепестков, что приводит к появлению на экранах индикаторов кроме основной отметки цели, так называемых ложных отметок. Угловое положение ложных отметок не соответствует угловому положению ВС в пространстве (рис.66).
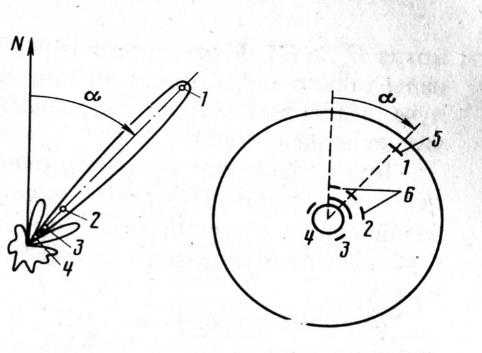
Рис. 66. Ложные отметки от ВС на экране ВРЛ
1,2,3,4 — отметки на индикаторе при разных положениях ВС; 5 — основная отметка; 6 — ложные отметки
Ложные отметки снижают качество работы системы, затрудняют наблюдение за полезными отметками и снижают точность измерения азимута. Все это требует принятия специальных мер для устранения ложных отметок, которые называются подавлением сигналов боковых лепестков. Эти меры применяются как в канале запроса, так и в канале ответа. В первом случае устраняется срабатывание ответчика от сигналов запроса, излучаемых боковыми лепестками, во втором — прием сигналов ответа боковыми лепестками антенны запроса ВРЛ. Наиболее эффективным способом является сравнение сигналов направленной антенны ВРЛ с сигналами специальной ненаправленной в горизонтальной плоскости антенны подавления. Для реализации этого способа в ВРЛ используются два передатчика: Прд запроса (Прд з), связанный с направленной антенной запроса А з, и Прд подавления, (Прд п), связанный с антенной подавления А п (рис.67) .
Рис. 67. Подавление сигналов боковых лепестков по каналу запроса:
а — упрощенная структурная схема; б — амплитудные соотношения сигналов запроса и подавления; 1 — диаграммы излучения сигналов запроса Е з и подавления Е п; 2 — сигналы запроса, принятые от главного лепестка; 3 — сигналы запроса, принятые от боковых лепестков; 4 — импульсы запроса; 5 — импульс подавления
Антенна подавления излучает сигналы подавления на частоте запроса, а в ответчике импульсы подавления выделяются по известному временному интервалу между ними импульсами запроса. Мощность Прд п выбирается такой, чтобы амплитуда излучаемых сигналов подавления была меньше уровня сигналов запроса, излучаемых главным лепестком, но больше уровня сигналов запроса, излучаемых боковыми лепестками (рис.67,б). Когда ВС облучается главным лепестком, амплитуда сигналов запроса будет больше амплитуды сигнала подавления: Е з > Е п. Если же ВС облучается боковыми лепестками, то Е з< Е п. В ответчике на выходе приемника используется схема амплитудного сравнения САС. Она пропускает импульсы на схему формирования ответов УФО только в том случае, когда Е з > Е п. Таким образом, ответчик вырабатывает ответные сигналы только тогда, когда он запрашивается сигналами главного лепестка, а сигналы запроса, передаваемые боковыми лепестками, на ответчик не воздействуют.
При подавлении по каналу ответа в ВРЛ используются два приемника (или два канала приема одного Прм): Прм ответа, связанный с Аз , и Прм подавления, связанный с Ап. Выходы этих Прм объединяются схемой амплитудного сравнения. На ее выходе выделяются сигналы, принимаемые главным лепестком. А з.
Недостатки существующих систем ВРЛ и перспективы развития
Опыт эксплуатации систем ВРЛ выявил ряд существенных недостатков, которые ограничивают их использование в составе автоматизированных систем УВД. К ним относятся:
невысокие точностные характеристики определения координат ВС
значительная зона (до 100 км) влияния боковых лепестков, снижающая вероятность получения информации при увеличении интенсивности воздушного движения и числа ответчиков из-за наложения ответных кодов;
недостаточный объем информации, содержащийся в ответных сигналах; невысокая пропускная способность;
ограниченная пропускная способность по информационному обмену.
Радикально устранение существующих недостатков СВРЛ будет осуществлено при внедрении дискретно-адресной ВРЛС (ДАС).
Основной принцип работы ДАС заключается в использовании индивидуальной адресации запроса и ответа, для чего всем ВС (ответчикам) присваиваются номера-адресы, а в сигналы запросов и ответов включаются адреса ответчиков ВС. При этом значительно уменьшается вероятность наложения кодов, так как поток ответных сигналов уменьшится в 10…20 раз.
Следовательно, увеличивается пропускная способность ответного канала ВРЛС. Это позволит увеличить объем передаваемой по ним информации и использовать его для речевого обмена между диспетчерами и экипажами ВС. В принципе число запросов на одно ВС при адресной работе может быть уменьшено до одного.
В ДАС, кроме запросной и расширенной полетной информации, с борта ВС будут передаваться следующие сообщения: навигационная информация от БПНК ВС, информация о метеообстановке в районе полета, решение экипажа по использованию полетной информации, а с земли будут передаваться: указания диспетчера УВД, дублирующие их передачу по каналу голосовой связи (эшелон, курс, частота радиосвязи, минимальная безопасная высота полета), инструктивная информация о воздушной обстановке. Кроме того, по этим же каналам обеспечивается автоматическая работа системы предупреждения столкновений с ВС и с землей. Предусмотрено буквенно-цифровое отображение информации в кабине пилотов.
Для запроса каждого ВС запросчик должен хранить данные об адресах и ориентировочном местоположении ВС, находящихся в зоне действия ВРЛ. Для получения этих сведений ДАС вначале работает в режиме “Вызов всем” с запросом координат всех ВС и адресов ВС с ответчиками ДАС. Ответы запоминаются в наземной РЛС, после чего возможна работа в режиме индивидуального запроса, который заключается в ориентировании ДНА на определенные ВС по заданной оператором программе с целью их автосопровождения. Периодически режим “Вызов всем” должен повторяться с целью получения обновленной информации о несопровождаемых ВС и новой от ВС, вошедших в зону наблюдения. Возможность одновременной работы систем ДАС и существующих СВРЛ обеспечивается чередованием адресного и неадресного режимов. Длительность периода адресной работы выбирается
такой, чтобы обеспечить обработку 10 ответчиков в луче ДН. В таблице 13 приведены основные характеристики вторичных радиолокаторов
Таблица 13
| Характеристика | Корень-АС | Лист | ДАС |
| Максимальная дальность действия, км | - | 400/160 | |
| Пределы зоны обзора по углу места, град | 0,5…45 | 0,5…45 | 0,3 50 |
| Вероятность получения информации | ≥ 0,9 | 0,95 | 0,9…0,98 |
| Вероятность получения ложной информации | 10-3 | - | 10-6 |
| СКП измерения дальности, м | 200/50 | ||
| СКП измерения азимута, угл. мин | |||
| Время обновления информации , с | 4 и 20 | - | 5 и 10 |
| Наработка на отказ, ч | > 500 | ||
| Технический ресурс, ч | - | ||
Похожие статьи:
poznayka.org
Радиолокационная система посадки — КиберПедия
Радиолокационная система посадки (РСП) предназначена для управления полетом ВС в зоне аэродрома, а также для контроля за выдерживанием ими курса и глиссады при заходе на посадку. Обычно РСП используется как дополнительное средство к инструментальным системам посадки, но они могут применяться и в качестве самостоятельных средств посадки. В последнем случае полученная информация служит основой для наведения ВС по командам с земли во время захода на посадку до визуального контакта экипажа с наземными ориентирами (практически до высот 30-40 м).
Система РСП обычно располагается против середины ВПП, чтобы контролировать оба курса посадки и в стороне от ВПП на удалении 150-200 м от ее осевой линии. Индикаторы средств системы РСП выносятся на расстояние до 3х км на диспетчерские пункты УВД: ДПП, ДПК, ПДП.
В состав системы РСП входят:
Ø посадочный радиолокатор;
Ø обзорный аэродромный радиолокатор или аэродромный радиолокационный комплекс;
Ø автоматический радиопеленгатор;
Ø средства авиационной радиосвязи с ЭВС;
Ø средства объективного контроля (рис.10)..
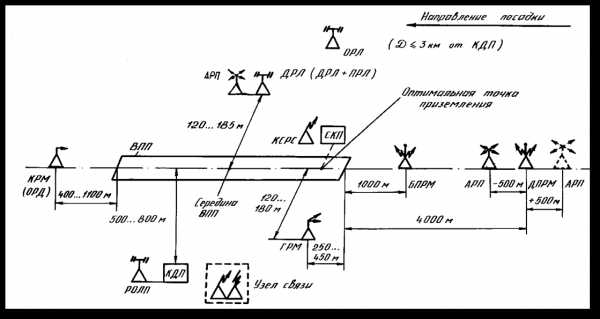
Рис.10. Примерная схема расположения радиотехнических систем посадки
Посадочный радиолокатор
Основным элементом РСП является посадочный радиолокатор, предназначенный для контроля за положением ВС, начиная со входа ВС в зону действия посадочного радиолокатора (с начала четвертого разворота прямоугольного маршрута) и до высоты 30-40 м относительно уровня ВПП.
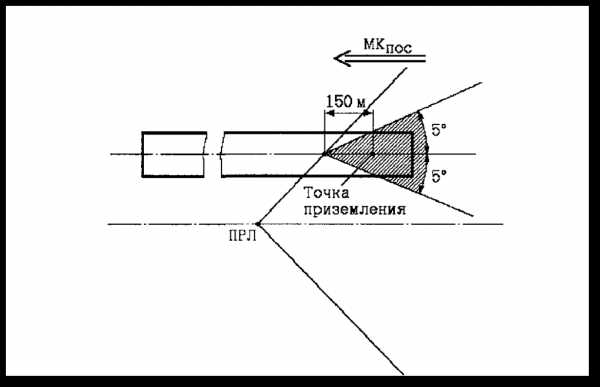
Положение ВС определяется по отклонениям его отметки на индикаторе ПРЛ от курса посадки, номинальной глиссады и дальностью до точки приземления. Обнаруженные с помощью ПРЛ отклонения от линии курса и глиссады передаются на борт ВС по линии радиосвязи.
При использовании ПРЛ как средства управления ВС, заходящими на посадку, необходимость в дополнительном посадочном оборудовании на борту ВС отпадает, что является достоинством данной системы по сравнению с РМС. Однако точность вывода ВС в заданную точку с помощью РСП ниже, чем с помощью РМСП, поэтому при оборудовании аэродрома той и другой системами посадки заход ВС на посадку осуществляется по РМСП, а РСП используется для контроля за посадкой ВС.
Существующие в ГА предельно допустимые отклонения ВС при заходе на посадку по курсу и глиссаде используются диспетчерским персоналом при контроле за заходящим на посадку ВС табл.1.
Таблица 1
| Д до ВПП, км | Формулы | |||||||||
| По курсу ± м | ∆Км=Дкм×32 | |||||||||
| По глиссаде ± м | ∆Гм=Дкм×8 |
Отклонения ВС на участке от ДПРМ до БПРМ за пределы, указанные в таблице, являются грубым отклонением – ЭВС обязан уйти на 2й круг, а диспетчер должен дать команду об уходе на 2й круг.
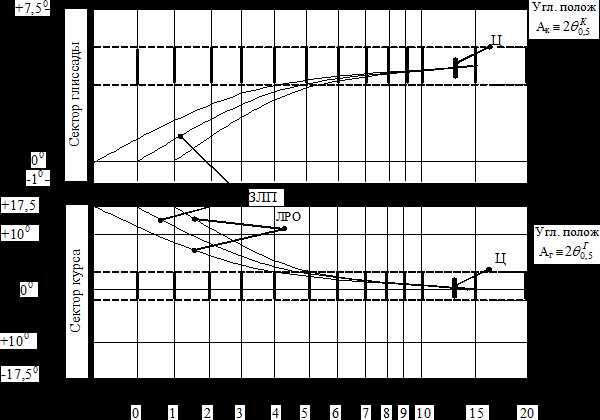
Рис.11. Вид развертки на ИКГ: ЗЛП – заданная линия пути;
ЛРО – линии равных отклонений; Ц – цель ВС.
ПРЛ является радиолокационной станцией секторного обзора, которая обеспечивает наблюдение сектора воздушного пространства с помощью курсовой и глиссадной антенны. Зона действия РЛС ограничена по азимуту углом 30°, а по углу места — 9°. Дальность действия посадочного радиолокатора составляет 20 км.
Курсовая антенна предназначена для контроля за положением ВС относительно плоскости курса, глиссадная – относительно плоскости планирования. Необходимая точность определения местоположения ВС обеспечивается применением антенн с остронаправленным излучением.
Посадочный радиолокатор состоит из трех основных частей: антенной системы, приемопередатчика и индикатора.
Принцип заключается в следующем. Излученные посадочным радиолокатором радиоимпульсы отражаются от ВС, принимаются антеннами радиолокатора и поступают в приемник. После соответствующего преобразования импульсы поступают на совмещенный индикатор курса и глиссады, где видна глиссада снижения и линия курса. Кроме отметки от ВС на экране высвечиваются линии дальности, по которым можно установить удаление ВС от торца ВПП (рис.11).
Посадочный радиолокатор рекомендуется устанавливать на траверзе ВПП на расстоянии 120-185 м от ее оси, на стороне, противоположной участку застройки и рулежным дорожкам. С места установки посадочного радиолокатора не должно быть естественных и искусственных препятствий, образующих углы закрытия более 0,5°.
Основными типами посадочных радиолокационных станций, используемых в аэропортах ГА, являются радиолокаторы РП-3Г и РП-4Г, выпускаемые фирмой «Тесла» (Чехия).
| Рис.12. Размещение посадочного радиолокатора на аэродроме. |
Основные технические характеристики посадочного радиолокатора РП-3Г(РП-4Г)
Длина волны сантиметровая в пределах, см………………………………….3,2(3,5)
Дальность действия, км……………………………………………………………..20(30)
Режим обзора секторный
Сектор обзора:
Ø по азимуту, град……………………………………………………………….30
Ø по углу места, град……………………………………………………………10
Диаграмма направленности антенны
а) курсовой:
Ø ширина в горизонтальной плоскости, град……………………………..0,8
Ø ширина в вертикальной плоскости, град………………………………..от 1 до 7(6)
б) глиссадной:
Ø ширина в вертикальной плоскости, град………………………………..0,6(0,5)
Ø ширина горизонтальной плоскости, град……………………………….от – 5 до + 20
Разрешающая способность на удалении на удалении до 17 км:
Ø по дальности, м……………………………………………………………….150(120)
Ø по азимуту, град……………………………………………………………….0,8(1,2)
Ø по углу места, град……………………………………………………………0,6
Разрешающая способность на удалении на удалении от 17 до 30 км, только для РП-4Г:
Ø по дальности, м………………………………………………………………..250
Ø по азимуту, град……………………………………………………………….2
Ø по углу места, град……………………………………………………………1,5
Точность определения координат:
Ø по дальности, м………………………………………………………………..30
Ø по азимуту, м……………………………………………………………………9
Ø по углу места, м………………………………………………………………..6
Скорость обзора, циклов/мин……………………………………………………….15
Ограничения по ветру, м/с…………………………………………………………..20
Импульсная мощность передатчика, квт…………………………………………150
cyberpedia.su
Вопросы создания Единой автоматизированной радиолокационной системы
ВОЕННАЯ МЫСЛЬ № 5(9-10)/1995
Вопросы создания Единой автоматизированной радиолокационной системы
Генерал-полковник В.Ф.МИГУНОВ
Полковник А.А.ГОРЯЧЕВ
Полковник В.П.САУШКИН,
кандидат военных наук
РАДИОЛОКАЦИОННЫЕ станции (РЛС), впервые нашедшие применение в годы второй мировой войны, сегодня и в обозримом будущем будут наиболее распространенным источником получения информации о воздушной, морской и метеорологической обстановке. В настоящее время радиолокационные средства (системы) и другие устройства, построенные на принципах радиолокации, широко используются в войсках, а также в различных сферах производства, науки и техники. На их базе созданы и функционируют крупные системы, осуществляющие контроль воздушного и космического пространства, обеспечивающие управление движением летательных аппаратов.
Так сложилось, что отдельные ведомства, по роду деятельности связанные с использованием РЛС, развивали их, а также системы сбора, обработки, отображения и передачи радиолокационной информации без тесной увязки друг с другом. Низкий уровень стандартизации и совместимости средств и систем управления, алгоритмов и программного обеспечения привел, в свою очередь, к обособлению ведомственных радиолокационных систем, дублированию функций, существенно затруднил взаимодействие. Поэтому проблема интеграции ведомственных радиолокационных систем в Единую автоматизированную радиолокационную систему (ЕАРЛС) является одной из наиболее актуальных. Ее решение позволит избежать ненужного дублирования и рационально распорядиться ресурсами средств разведки (наблюдения) воздушного пространства.
Идея интеграции средств радиолокации не нова. Решение о создании единой радиолокационной системы было утверждено постановлением ЦК КПСС и Совета Министров СССР за №361-232 еще в 1956 году. В то время имелась в виду система, обеспечивающая одновременно обнаружение целей, наведение истребительной авиации, целеуказание зенитным ракетным и артиллерийским системам, выдачу информации системе управления.
Однако развитие радиолокации привело к появлению специализированных РЛС и АСУ, которые более полно учитывали специфику задач, решаемых видами Вооруженных Сил, гражданской авиацией. Ведомственная же разобщенность, отсутствие должной координации разработок указанной техники привели к уменьшению серийности образцов радиолокационного вооружения, увеличению его стоимости, использованию различных средств и систем связи, принципов обработки и обмена радиолокационной информацией, что в конечном счете усложнило эксплуатацию, ремонт техники и подготовку боевых расчетов.
В середине 70-х годов необходимость межвидовой унификации и совместного использования РЛС стала очевидной, но их реализация сдерживалась, во-первых, отсутствием приемлемых технических решений, обеспечивающих обмен радиолокационной информацией нужного качества между элементами интегрируемых систем, во-вторых, недоверием потребителей к информации, поступающей от других источников. Кроме того, вопрос экономии ресурсов не приобрел еще такой остроты.
В настоящее время в Вооруженных Силах Российской Федерации насчитывается свыше 10 тыс. РЛС с дальностью действия более 100 км, не менее 1000 аналогичных РЛС имеется в других ведомствах. Наиболее широко применяются средства радиолокации в Войсках ПВО, Сухопутных войсках, Военно-Воздушных Силах, на Военно-Морском Флоте и в гражданской авиации. Так, в Войсках ПВО созданы две большие функционально завершенные информационные системы. Одну из них образуют радиолокационные станции и иные средства разведки войск ракетно-космической обороны (РКО), другую — соединения и части радиотехнических войск ПВО.
В Сухопутных войсках при значительном количестве РЛС различного назначения интерес представляют радиолокационные средства радиотехнических соединений и частей войск ПВО, которые предназначены для ведения разведки, сбора и обработки радиолокационной информации в границах армии или фронта. В Военно-Воздушных Силах РЛС состоят на вооружении частей радиотехнического обеспечения полетов. Сбор и обработка радиолокационной информации осуществляются в масштабе авиационной дивизии. Радиолокационные станции имеются на всех боевых кораблях Военно-Морского Флота, а также на вооружении морских радиотехнических подразделений, частей радиотехнического обеспечения полетов морской авиации. Сбор и обработка информации осуществляются в системе боевых информационных постов. В гражданской авиации управление воздушным движением обеспечивают около 100 радиолокационных позиций. В районах Москвы и Ростова-на-Дону функционируют автоматизированные системы, объединяющие в установленных границах как РЛС, так и средства обработки, передачи и отображения радиолокационной информации.
Основной задачей всех перечисленных ведомственных радиолокационных средств, за исключением информационной системы РКО, является обнаружение и сопровождение воздушных целей, осуществляющих полет в диапазоне высот от 10 — 50 м до 30 — 40 км со скоростью от 100 до 3000 км в час. В связи с этим в них применяются однотипные или близкие по характеристикам РЛС.
Адекватность решаемых задач, принципиальная возможность и экономическая целесообразность объединения ведомственных радиолокационных систем позволили сделать первые практические шаги на пути к их интеграции в Федеральную систему разведки и контроля воздушного пространства (ФСР и КВП). Образованы и функционируют Центральная и зональные межведомственные комиссии, призванные координировать усилия всех ведомств, участвующих в создании ФСР и КВП. Развернута работа по созданию подразделений двойного назначения, способных одновременно выполнять задачи в интересах Министерства обороны и Министерства транспорта Российской Федерации.
Таким образом, осуществляемые мероприятия направлены на формирование организационной и материальной основ Единой автоматизированной радиолокационной системы и могут рассматриваться как первый этап ее создания. На данном этапе возможна лишь частичная реализация преимуществ интеграции, поскольку подразделения двойного назначения образуются лишь там, где имеется возможность передачи радиолокационной информации от источников к потребителям с помощью существующих технических средств.
Одним из основных препятствий, встающих на пути создания ЕАРЛС, является низкий уровень автоматизации процессов сбора и обработки радиолокационной информации на командных пунктах, центрах управления видов Вооруженных Сил и гражданской авиации, а также техническая несовместимость ведомственных АСУ. Оно может быть устранено за счет широкого оснащения радиотехнических подразделений и радиолокационных позиций, командных пунктов и пунктов управления Войск ПВО, других видов Вооруженных Сил, центров управления воздушным движением ЕС УВД унифицированными комплексами средств автоматизации (КСА) и центрами коммутации сообщений.
В соответствии с научными обоснованиями предполагается, что на ЕАРЛС будут возложены сбор и обработка данных о воздушной обстановке, поступающих от радиолокационных средств Министерства обороны и Министерства транспорта, автоматическое (автоматизированное) распределение радиолокационной информации и передача ее потребителям в реальном масштабе времени. Она будет представлять собой совокупность радиолокационных средств наземного, воздушного, морского и космического базирования, а также органов управления видов Вооруженных Сил и гражданской авиации, оснащенных технически совместимыми средствами автоматизации и связи, определенным образом размещенных в пространстве и функционально связанных между собой для решения задач противовоздушной обороны и управления воздушным движением в мирное и военное время.
В состав ЕАРЛС, по нашему мнению, должны войти силы и средства радиотехнических войск ПВО, войск связи и радиотехнического обеспечения ВВС, береговой системы наблюдения ВМФ, надводные корабли с функциями кораблей радиолокационного дозора, радиотехнические соединения (части) войск ПВО СВ, часть радиолокационных средств гражданской авиации (радиолокационные позиции двойного назначения), органы управления соответствующими силами и средствами радиолокационной разведки (наблюдения) видов Вооруженных Сил. В интересах ЕАРЛС целесообразно использовать также самолеты (вертолеты) радиолокационного дозора, РЛС загоризонтного обнаружения и космические средства дальнего обнаружения. Для контроля воздушного пространства могут привлекаться на принципах взаимодействия все силы и средства воздушного наблюдения гражданской авиации и центры управления ЕС УВД. Предусматривается возможность обмена информацией с другими аналогичными системами, в том числе принадлежащими иностранным государствам, при соблюдении режимных ограничений на некоторые сведения.
Поскольку ЕАРЛС призвана обеспечить сбор, обработку и выдачу данных о воздушной обстановке в интересах двух ведомств — Министерства обороны и Министерства транспорта, то она должна быть системой двойного назначения (военного и гражданского) и решать следующие задачи: непрерывное ведение радиолокационной разведки воздушного пространства в целях своевременного обнаружения воздушных судов — нарушителей Государственной границы России и средств воздушного нападения противника; выдача радиолокационной информации о воздушной обстановке органам управления видов Вооруженных Сил; радиолокационное обеспечение полетов (перелетов) авиации, контроль за соблюдением воздушными судами всех ведомств правил использования воздушного пространства; радиолокационное наблюдение за морской и воздушной обстановкой в прибрежной полосе и районах действий сил Военно-Морского Флота.
Для охраны Государственной границы Российской Федерации в воздушном пространстве, пресечения нарушений порядка его использования, своевременного приведения войск в высшие степени боевой готовности, обеспечения безопасности полетов авиации часть сил и средств ЕАРЛС будет привлекаться к несению боевого дежурства.
К основным принципам построения ЕАРЛС целесообразно отнести: соответствие пространственных, информационных и временных характеристик системы объему и характеру задач мирного и военного времени, решаемых в интересах всех потребителей радиолокационной информации; сосредоточение усилий на главных направлениях действий потенциального противника, на подступах к важнейшим районам и объектам страны, вдоль основных воздушных трасс и местных воздушных линий; соответствие показателей живучести радиотехнических подразделений степени опасности возможного огневого воздействия по ним; соответствие показателей помехоустойчивости возможностям потенциального противника по радиоэлектронному подавлению системы; надежное резервирование функционально важных элементов системы.
Требования к характеристикам радиолокационного поля, образуемого Единой автоматизированной радиолокационной системой, меняются в зависимости от важности воздушного направления, объектов обороны, близости к Государственной границе и интенсивности воздушного движения. Во внутренних районах страны поле создается прежде всего в интересах ЕС УВД. Радиолокационные позиции, располагаемые по трассам воздушного движения, должны обеспечивать управление воздушными судами при непрерывном радиолокационном контроле их полета на всех эшелонах высоты. Радиолокационное поле вдоль Государственной границы предназначено в первую очередь для недопущения незамеченного ее перелета. При этом рубеж обнаружения должен быть вынесен в сторону сопредельных государств (нейтральных вод) на расстояние, обеспечивающее достаточное время для выяснения обстановки и принятия в случае необходимости решения на применение по нарушителям дежурных сил ПВО.
В числе особенностей технической стороны создания ЕАРЛС следует выделить выбор минимально необходимой номенклатуры унифицированных РЛС, КСА, средств связи и передачи данных. Информационно-техническое объединение ведомственных систем предполагается достичь за счет использования единых стандартов сопряжения и унифицированных кодограмм обмена данными, унифицированной информационной модели отображения воздушной обстановки, единой системы индексов, номеров и типов воздушных объектов, а также методологической основы для выбора системы координат, проведения юстировки радиолокационных средств, организации специальной подготовки и тренировки должностных лиц органов управления ЕАРЛС.
Разработка и внедрение унифицированных КСА межвидового применения с функциями адаптеров сопряжения позволят избежать больших доработок имеющихся технических средств. Кроме того, информационную и техническую совместимость разнородных источников и потребителей радиолокационной информации призвана обеспечить создаваемая в рамках концепции ЕАРЛС система связи и обмена данными (ССОД). Ее основу составят автоматические центры коммутации сообщений (их пакетов), имеющие различную производительность и исполненные в подвижном и стационарном вариантах. Применение ССОД позволит перейти к сетевым (радиально-кольцевым) структурам систем сбора, обработки и выдачи радиолокационной информации, реализовать принцип распределенной обработки и хранения информации, обеспечить требуемый уровень устойчивости системы посредством гибкого использования обходных маршрутов. Высокая эффективность ЕАРЛС в условиях массированного воздействия на нее различных средств подавления может быть достигнута за счет оптимального применения имеющегося в распоряжении системы территориально распределенного ресурса и автоматического реконфигурирования структуры.
В завершенном виде Единая автоматизированная радиолокационная система будет представлять собой построенную по территориальному принципу гибкую иерархическую структуру с развитыми горизонтальными связями. Объединение ведомственных радиолокационных систем предполагается осуществить эволюционным путем (методом постепенных преобразований). При этом наиболее подходящей основой для создания ЕАРЛС, на наш взгляд, являются радиотехнические войска ПВО: во-первых, они располагают наиболее многочисленным и современным парком средств радиолокации и автоматизации; во-вторых, обладают развитой системой управления и постоянно выполняют задачи боевого дежурства, к которым относятся непрерывное ведение радиолокационной разведки, контроль за перелетом Государственной границы и соблюдением установленного порядка использования воздушного пространства, выдача радиолокационной информации на командные пункты зенитных ракетных войск и истребительной авиации ПВО.
На первых этапах создания ЕАРЛС организационные структуры радиолокационных систем видов Вооруженных Сил и ЕС УВД не претерпят больших изменений, органы управления сохранят ведомственную подчиненность. Радиолокационные средства будут работать по согласованному плану при осуществлении автоматизированного информационного взаимодействия на тактическом уровне. Даже в этом случае появятся хорошие возможности для более рационального использования имеющихся ресурсов, координации функционирования радиолокационных средств.
По мере накопления опыта использования информации, получаемой от источников, принадлежащих разным ведомствам, и разработки комплекса технических средств сопряжения целесообразно перейти к более «жесткой» форме объединения радиолокационных систем. Предполагается, что в компетенции органов управления ЕАРЛС будут находиться следующие основные вопросы: разработка планов развития ЕАРЛС и координация НИОКР в этой области с учетом основных направлений совершенствования сил и средств радиолокационной разведки (наблюдения) видов Вооруженных Сил и гражданской авиации; проведение единой технической политики при поэтапном создании ЕАРЛС, выработка предложений и рекомендаций видам Вооруженных Сил, гражданской авиации, ЕС УВД по направлениям развития средств радиолокации, автоматизации и связи, их стандартизации и совместимости в ЕАРЛС; разработка программ оснащения ЕАРЛС техническими средствами, планирование и формирование заказов на серийное производство, закупку новой техники для ЕАРЛС и ее развертывание; планирование и организация применения ЕАРЛС в интересах всех потребителей радиолокационной информации; разработка и согласование с видами Вооруженных Сил и органами ЕС УВД нормативно-правовых документов, регламентирующих порядок функционирования ЕАРЛС, вопросов размещения и передислокации входящих в систему радиолокационных подразделений.
Итак, интеграция ведомственных сил и средств радиолокационной разведки (наблюдения) и контроля воздушного пространства в единую автоматизированную систему позволит обеспечить требуемую эффективность решения задач противовоздушной обороны и управления воздушным движением в условиях сокращения состава сил, средств и ресурсов, а также электромагнитную совместимость средств радиолокации и связи видов Вооруженных Сил и гражданской авиации в районах совместного базирования.
militaryarticle.ru
Радиолокационная система — Большая Энциклопедия Нефти и Газа, статья, страница 3
Радиолокационная система
Cтраница 3
В радиолокационных системах антенны используются как для передачи, так и для приема энергии. В режиме передачи антенна получает энергию от передатчика через линию передачи и излучает ее в пространство. Во время приема антенна перехватывает часть энергии, отраженной от цели, и передает ее через линию передачи в приемник. Согласно теореме о взаимности параметры антенны одинаковы в режиме передачи и приема. Существенная разница заключается в том, что передающая антенна должна оперировать с большими мощностями. [32]
В импульсных радиолокационных системах имеется три временных показателя, которые необходимо запоминать в течение разных промежутков времени. Первым, имеющим порядок микросекунд, является длительность импульса. В качестве устройств запоминания в этом случае используются согласованные фильтры. Второй показатель представляет собой время перемещения антенны на угловое расстояние, равное ширине луча. Оно имеет порядок миллисекунд. Часто на цель попадает несколько радиоимпульсов. [34]
В радиолокационных системах сопровождения R представляет собой угловую координату цели ( например, азимут или угол места), С — угловое положение антенны, Е — ошибку, GI — радиолокационный приемник и демодулятор, MI-электрический сигнал на выходе радиолокационного приемника, являющийся мерой величины ошибки. [35]
В радиолокационных системах слежения СС за движущимися целями управляющими координатами для антенны ( рис. 1.8, а) являются углы места Uf и азимута а. [36]
В авиации радиолокационные системы служат дли решения навигационных задач и для управления воздушным движением. Чтобы при необходимости можно было определить принадлежность обнаруженного самолета, его снабжают специальным радиолокационным ответчиком, который при приеме радиолокационных импульсов посылает свой закодированный радиоответ. Бортовые самолетные РЛС используются также для определения истинной ( путевой) скорости полета, выявления грозовых фронтов и для получения на экране электроннолучевой трубки радиолокационного изображения земной поверхности при отсутствии ее видимости. Радиолокационные высотомеры, устанавливаемые на самолете, позволяют с большой точностью определить истинную высоту полета. В условиях арктических полетов специальные бортовые РЛС позволяют определять толщину льда, что необходимо для установления возможности посадки самолета на лед. [37]
Дальностью действия радиолокационных систем называется максимальное расстояние между РЛС и объектом, при котором энергия принятого сигнала достаточна для обнаружения его с заданной вероятностью либо для измерения соответствующей координаты с заданной точностью. Сначала рассмотрим дальность действия РЛС в свободном пространстве, где нет поверхностей, отражающих сигналы, где нет надобности учитывать затухание радиоволн. [38]
Рабочий сектор радиолокационной системы зависит от высоты подъема антенны над земной поверхностью и от рельефа окружающей местности. В низкочастотной области сверхвысокочастотного диапазона влияние местоположения и проводимости почвы на положение нулей диаграммы направленности затрудняет определение рабочего сектора в большей степени, нежели на более высоких частотах. На рис. 25.9 пунктирной линией показана рабочая зона, обычно требуемая от радиолокаторов гражданского назначения, а сплошной линией показано, как эта рабочая зона обеспечивается современной радиолокационной системой на частоте 600 Мгц. [40]
В большинстве радиолокационных систем необходимо обеспечить возможность вращения антенны, сохраняя передатчик и — приемник в неподвижном состоянии. В результате возникает проблема создания приборов СВЧ, у которых один из зажимов неподвижен, а другой вращается. Такое устройство известно под названием вращающегося сочлени-теля. [41]
Для большинства радиолокационных систем такие крупные цели, как реактивные лайнеры, являются точечными целями. Протяженными целями являются цели, такие, как горы, которые представляют собой более крупные объекты и радиолокационные станции способны различать ряд их элементов. [43]
Поэтому для радиолокационных систем, предназначенных для наблюдения погоды, выбираются короткие волны. [44]
Структурная схема обычной радиолокационной системы изображена на рис. 9.1, а; усилители и преобразователи частоты, которые на практике необходимы, здесь не показаны. [45]
Страницы: 1 2 3 4
www.ngpedia.ru